Volume 24 article 1330 pages: 244-256
Received: Oct 23, 2025 Accepted: May 11, 2026 Available Online: May 27, 2026 Published: May 31, 2026
DOI: 10.5937/jaes0-62345
MULTI-OBJECTIVE OPTIMIZATION OF TWO-STAGE HELICAL GEARBOXES USING NSGA-II AND MCDM METHODS: MINIMIZING MASS AND MAXIMIZING EFFICIENCY
Abstract
This study presents a multi-criteria design approach for two-stage helical gearboxes using the Non-dominated Sorting Genetic Algorithm II (NSGA-II) in combination with MCDM methods. The optimization problem was formulated with two conflicting objectives: minimizing gearbox mass and maximizing transmission efficiency. NSGA-II was employed to generate a set of Pareto-optimal solutions, while three different MCDM methods—MARCOS (the Measurement of Alternatives and Ranking according to Compromise Solution (MARCOS), TOPSIS (Technique for Order Preference by Similarity to Ideal Solution), and SAW (Simple Additive Weighting)— was applied to identify the most preferred compromise design among them. Regression analysis revealed a strong linear relationship between the stage-one gear ratio (u1) and the overall transmission ratio (uh), ensuring practical feasibility of the optimized gear allocation. Numerical results demonstrated that gearboxes designed with transmission ratios in the range of uh=15–25 achieved the most balanced trade-off between reduced mass and high efficiency. The proposed hybrid NSGA-II–MCDM framework thus provides a powerful decision-support tool for gearbox designers, enabling both lightweight and energy-efficient configurations. In addition, the findings have clear practical implications, as the proposed framework can support the development of more compact and efficient gearboxes in automotive and industrial applications, where reducing mass and improving efficiency are critical design requirements.
Keywords
Content
1 Introduction
Multi-objective optimization has become essential in modern gearbox design, where engineers must simultaneously minimize weight and maximize efficiency. Traditional single-objective approaches cannot effectively resolve such conflicting goals, leading to the adoption of evolutionary algorithms and decision-making techniques. Among these, the Non-dominated Sorting Genetic Algorithm II (NSGA-II) remains one of the most robust and widely applied methods in engineering optimization [1]. The foundational work of Konak et al. [2] further highlighted the versatility of genetic algorithms for reliability and system safety, establishing a basis for gearbox applications.
Metaheuristic algorithms have been extensively applied in mechanical transmission systems. Savsani et al. [3] used particle swarm optimization and simulated annealing to reduce gear train weight, while Patil et al. [4] incorporated tribological constraints for more realistic spur gearbox optimization. Le and Vu [5] combined the Taguchi method with grey relational analysis to enhance efficiency and durability in two-stage helical gearboxes, and Tran et al. [6] demonstrated the effectiveness of TOPSIS in identifying compromise designs from Pareto-optimal sets.
The application of NSGA-II in gearbox optimization has been widely studied. Sanghvi et al. [7] and Patil et al. [8] achieved effective trade-offs between size and efficiency for two-stage helical and spur gearboxes, respectively. Maputi and Arora [9] integrated NSGA-II with decision-making methods to improve solution ranking, while Ananthapadmanabhan et al. [10] and Méndez et al. [11] compared various evolutionary algorithms, showing that hybrid frameworks often perform better across complex problems.
Recent research has expanded toward acoustic and dynamic considerations. Lei et al. [12] reduced noise and vibration in electric bus gearboxes through multi-objective optimization, Qi et al. [13] applied response surface methodology with acoustic participation, and Younes et al. [14] enhanced efficiency and minimized transmission error. Similarly, Hu et al. [15] demonstrated the adaptability of heuristic algorithms for aeroengine accessory gearboxes.
Despite these advances, most studies focused on Pareto front generation without strong decision-support integration, or applied decision-making methods such as TOPSIS, EDAS, or GRA independently. The MARCOS method—effective in multi-criteria ranking-has rarely been explored in gearbox optimization [16]. Moreover, combining NSGA-II with MCDM for two-stage helical gearboxes, particularly to balance mass reduction and efficiency enhancement, remains underdeveloped.
Beyond gearbox design, optimization and performance assessment are critical in broader engineering contexts. Studies on fiber-reinforced polymers (FRPs) have provided insights into processing, mechanical behavior, and applications in energy industries [17, 18], while reviews have traced the evolution of FRP technologies [19]. Advances in renewable energy and thermal systems, including high-capacity solar inverters [20] and Peltier element performance analyses [21], emphasize the importance of integrating optimization and energy-efficient design.
MCDM methods have become vital complements to optimization algorithms in machine and gearbox design. Tran et al. [6] used TOPSIS for two-stage helical gearboxes, and Dinh et al. [16] applied MARCOS to double-gear systems, confirming their capability in ranking compromise solutions. Similarly, Mankhi et al. [22] used AHP for bearing selection in wind turbine gearboxes, Terán et al. [23] applied MCDM for material selection, Yan et al. [24] used MCDM to identify key parameters in planetary gears, and Jovanović et al. [25] combined AHP and TOPSIS to optimize gear pairs. These works show that evolutionary algorithms generate optimal sets, while MCDM provides systematic decision support.
Although NSGA-II is highly effective in generating diverse Pareto-optimal solutions, it does not inherently identify the most preferred compromise design for engineering implementation. Therefore, integrating NSGA-II with MCDM techniques provides a practical decision-support framework. In this study, MARCOS, TOPSIS, and SAW were selected because they represent different ranking philosophies, including utility-based assessment, ideal-solution distance evaluation, and weighted aggregation. The simultaneous application of these methods enables robust verification and reduces dependence on a single decision-making strategy.
This study simultaneously optimizes two conflicting objectives-gearbox mass and transmission efficiency-representing the fundamental design trade-off where lightweight structures can lower efficiency and vice versa. The main goal is to determine optimal first-stage gear ratios and face-width coefficients governing this trade-off. To the best of our knowledge, no prior study has jointly optimized these objectives for two-stage helical gearboxes using NSGA-II combined with MCDM.
Unlike previous studies that primarily relied on a single MCDM technique, the present study integrates NSGA-II with three complementary decision-making approaches, namely MARCOS, TOPSIS, and SAW. This combination enables not only Pareto-optimal solution generation but also robust verification of the ranking process from multiple analytical perspectives, thereby improving the reliability of compromise gearbox design selection.
Therefore, this work proposes a hybrid framework integrating NSGA-II for Pareto front generation with three MCDM methods-MARCOS, TOPSIS, and SAW-to select the best compromise design. Focusing on mass minimization and efficiency maximization, regression and trend analyses are conducted to provide methodological and practical insights into designing lightweight, high-efficiency two-stage helical gearboxes.
1.1 Optimization problem
1.1.1 Determination of gearbox mass
For a two-stage helical gearbox, the gearbox mass mgb is calculated by (Figure 1):
Where mgh, mg, and ms are the mass of the gearbox housing, the gears and the shafts. These components can be in detail as follows:
- Calculation of mgb:
With
In which, Vsf, Vef, and Vbf are the volume of a side face, an end face, and a base face of the gearbox. These elements can be found by:
In the above Equations, L, H, and B are determined by:
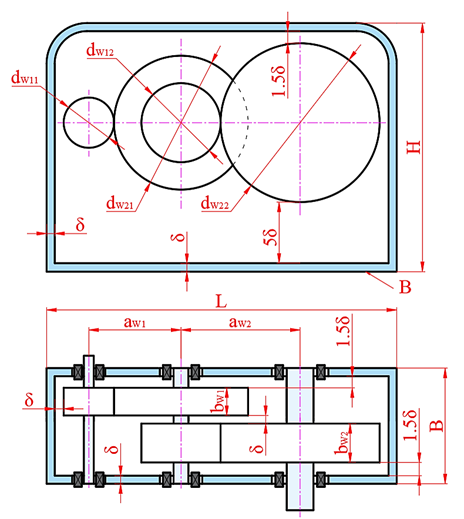
Fig. 1. Structural scheme for determining gearbox mass
Where δ=7÷10 (mm) [26]; dw1i, dw2i (i=1÷2) are the pitch diameter of the pinion and the gear of stage i which can be computed by [26]:
In which, awi (i=1÷2) represents the center distance of stage i which is determined based on the contact strength condition by [26]:
Where Xbai is the wheel face width coefficient of stage ith; T1i (i=1÷2) is the pinion torque of stage i which can be calculated by:
- Calculation of mg:
In which, ρg=7800 (kg/m3) as the gear material is steel; e1=1 and e2=0.6 [17].
- Calculation of ms:
ms is the total mass of all gearbox shafts. As there are three shafts in the gearbox, it can be found by:
In which
With lsj is the length of the shaft i which is determined by:
The diameter of the shaft j (j=1÷3) can be found by [27]:
In the above Equations, ρs=7800 (kg/m3) as the shaft materials are steel; $[\tau]$ = 17 (Mpa) [27].
1.1.2 Determining gearbox efficiency
The total gearbox efficiency ηgb can be determined by:
In which, Pl is the total power loss in the gearbox which is calculated by [27]:
Where Plg, Plb, Pls, and PZ0 denote the gear meshing loss, bearing friction loss, seal resistance loss, and the loss due to idle motion, respectively. These components can be found as reported in [5].
1.1.3 Objective functions and constraints
The design of the two-stage helical gearbox is posed as a bi-objective optimization problem, in which two inherently conflicting design goals are considered simultaneously: reducing the overall gearbox mass mgb to achieve a more compact and lightweight structure and maximizing the mechanical efficiency ηgb to ensure superior power transmission performance. These objectives are mathematically formulated as follows:
The optimization problem was formulated as a simultaneous bi-objective minimization problem, where gearbox mass was minimized and gearbox efficiency was maximized by minimizing its negative value.
To address these objectives, the optimization problem is defined in terms of three continuous design variables. These factors exert a critical influence on both the geometric configuration and efficiency of the gearbox. These variables include u1, Xba1, and Xba2. Together, they govern the distribution of gear ratios across the two stages and determine the dimensional characteristics of the gears, thereby directly influencing the housing length and overall transmission efficiency.
In order to guarantee feasible and manufacturable solutions, practical constraints are imposed on the design variables [27]:
2 Materials and methods
The present study develops a hybrid optimization and decision-support framework that integrates the Non-dominated Sorting Genetic Algorithm II (NSGA-II) with multi-criteria decision-making (MCDM) techniques for the design of two-stage helical gearboxes. The framework simultaneously addresses two conflicting objectives—minimizing gearbox mass and maximizing transmission efficiency—which represent the fundamental trade-off in practical gearbox engineering. The methodology operates in two sequential phases: first, NSGA-II is employed to generate a Pareto-optimal set of solutions representing the best trade-offs between the objectives; second, the Entropy method is applied to determine objective, data-driven weights for each design criterion. These weights are subsequently utilized in three MCDM techniques—MARCOS, TOPSIS, and SAW—to rank the Pareto-optimal solutions from different analytical perspectives, thereby ensuring a robust and consistent selection of the most preferred gearbox design.
2.1 NSGA-II algorithm
The NSGA-II is a widely adopted evolutionary algorithm for solving multi-objective optimization problems [1]. It is particularly effective for engineering design tasks where multiple conflicting objectives must be optimized simultaneously. In the context of gearbox optimization, NSGA-II provides a Pareto-optimal set of trade-off solutions between minimizing gearbox mass and maximizing transmission efficiency.
The algorithm operates on the principles of elitism and fast non-dominated sorting. Initially, a population of candidate solutions is randomly generated within the feasible design space. Each solution is evaluated with respect to the two objective functions defined in Section 2. The non-dominated sorting procedure then classifies solutions into different fronts based on Pareto dominance. A crowding distance measure is applied to preserve diversity within the Pareto set.
The evolution proceeds through genetic operators including selection, crossover, and mutation, ensuring a balance between exploration and exploitation of the search space. At each generation, the combined parent and offspring populations are sorted, and the best individuals are selected to form the next generation. This process continues until a predefined number of generations is reached, resulting in an approximation of the Pareto front. The output of NSGA-II is therefore a diverse set of non-dominated gearbox designs. It provides alternative trade-offs between compactness and efficiency.
Algorithmic settings (as implemented in MATLAB). For each uh, we run NSGA-II with population N=100, generations G=200, simulated binary crossover (SBX) with distribution index ηc=20 and probability pc=0.9, polynomial mutation with ηm=20 and probability pm=0.1, tournament selection, fast non-dominated sorting and crowding-distance elitism. Bound constraints were applied to ensure that decision variables always remain within their feasible ranges (u1 ∈ [1,9], Xba1, Xba2 ∈ [ 0.25, 0.40]) after crossover and mutation operations. Feasibility in gear geometry is ensured by the closed-form relations in Sec. II (e.g., u2=uh/u1).
In this work, the selected NSGA-II parameters were chosen based on commonly recommended settings in the literature for engineering multi-objective optimization problems and through preliminary trial simulations to ensure convergence stability, solution diversity, and computational efficiency. The adopted crossover and mutation probabilities provide a balance between exploration and exploitation of the search space.
2.3 MCDM methods
To identify the most preferred compromise solutions among the Pareto-optimal gearbox designs generated by NSGA-II, three multi-criteria decision-making (MCDM) techniques, namely MARCOS, TOPSIS, and SAW, were employed. These methods provide complementary ranking philosophies for evaluating alternatives with respect to conflicting objectives, including gearbox mass minimization and efficiency maximization. The MARCOS method evaluates alternatives relative to ideal and anti-ideal solutions [28], TOPSIS ranks alternatives according to their distances from the ideal solution [29], while SAW determines the overall preference through weighted additive aggregation [30].
In the present study, the decision matrix can generally be expressed as:
where $x_{ij}$ denotes the performance value of alternative $i$ under criterion $j$, while $m$ and $n$ represent the numbers of alternatives and criteria, respectively.
2.2.1 MARCOS method
The MARCOS method evaluates alternatives relative to both ideal and anti-ideal solutions. First, the extended decision matrix is formed by including the ideal alternative (AI) and anti-ideal alternative (AAI):
The normalized matrix is then obtained as:
For cost criteria:
For benefit criteria:
The weighted normalized matrix is computed by:
where $w_j$ denotes the weight coefficient of criterion $j$.
The utility degree of each alternative relative to the anti-ideal and ideal solutions is determined by:
where
Finally, the utility function $f(K_i)$ is evaluated and alternatives are ranked according to the maximum utility value. The MARCOS method therefore provides a compromise-based ranking strategy by simultaneously considering both ideal and anti-ideal references.
2.2.2 TOPSIS method
The TOPSIS method ranks alternatives according to their geometric distances from the ideal and negative-ideal solutions.
The normalized decision matrix is first computed as:
The weighted normalized matrix is then obtained by:
The positive ideal solution $A^+$ and negative ideal solution $A^-$ are subsequently determined:
The Euclidean distances from the ideal and negative ideal solutions are calculated by:
Finally, the closeness coefficient is determined as:
Alternatives are ranked according to descending values of $R_i$, where larger values indicate better compromise solutions.
2.2.3 SAW method
The SAW method is one of the most straightforward and computationally efficient MCDM techniques. It evaluates alternatives through weighted summation of normalized criteria values.
For benefit criteria, normalization is performed as:
For cost criteria:
The overall preference value of each alternative is then computed by:
where $V_i$ denotes the overall performance index of alternative $i$. The best alternative corresponds to the maximum value of $V_i$.
Together, the three MCDM techniques provide complementary evaluation perspectives for the Pareto-optimal solutions generated by NSGA-II. MARCOS emphasizes utility relative to ideal and anti-ideal solutions, TOPSIS evaluates geometric proximity to the ideal solution, while SAW employs weighted additive aggregation. Their simultaneous application enhances the robustness and reliability of the final decision-making process for gearbox design optimization.
2.3 Entropy method
In this study, the Entropy method is employed to objectively determine the weights of the evaluation criteria. This method quantifies the amount of information contributed by each criterion based on data variability and assigns corresponding weights to reflect their relative importance. By relying on information theory rather than subjective assessment, the Entropy approach ensures impartial and data-driven weighting, making it particularly suitable for contemporary MCDM applications [31]. Furthermore, it is one of the most widely adopted and validated weighting techniques in engineering optimization and decision-making problems, owing to its simplicity, robustness, and ability to minimize human bias. The general procedure follows the standard Entropy framework outlined in [30].
3 Results and discussion
3.1 Trends of gearbox mass and efficiency versus transmission ratio
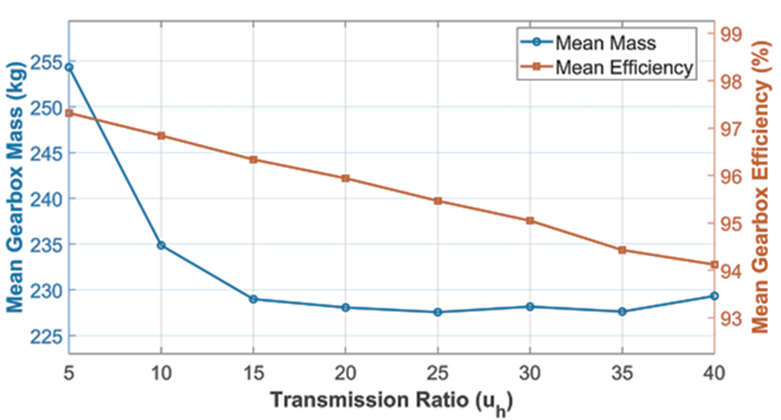
Fig. 2. Mean trends of gearbox mass and efficiency with respect to uh
Figure 2 illustrates the mean trends of gearbox mass (mgb) and efficiency (ηgb) as functions of uh. The results highlight opposite tendencies:
- Gearbox mass decreases significantly from approximately 255 kg at uh=5 to around 228–230 kg in the range of uh=20–25, after which a slight increase is observed at higher ratios.
- Gearbox efficiency shows a gradual reduction, decreasing from about 98% at uh=5 to 94% at uh=40.
This inverse relationship confirms that lightweight designs often incur higher transmission losses, and thus a careful trade-off between compactness and efficiency is required.
3.2 Pareto front analysis and optimal solutions
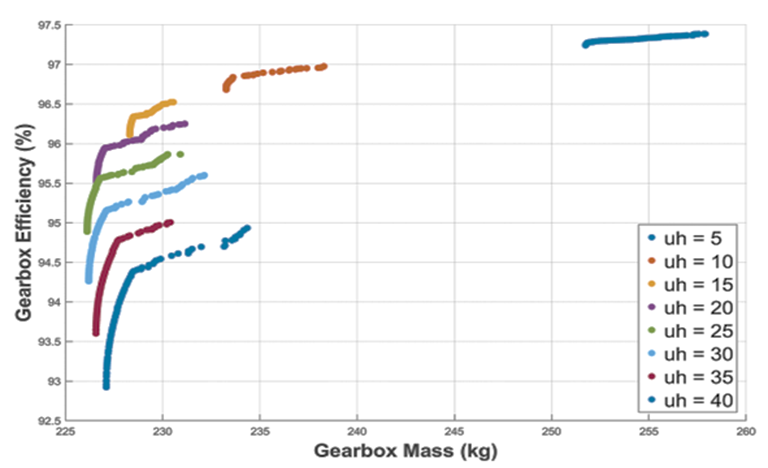
Fig. 3. Pareto-optimal fronts of gearbox mass and efficiency for different values of uh
The Pareto fronts obtained by NSGA-II for various values of uh are depicted in Figure 3. Several important observations can be drawn:
- At uh=5, designs exhibit the highest efficiency (up to ~97.5%) but correspond to the largest gearbox mass (~230–255 kg).
- At uh=10, a notable mass reduction (225–235 kg) is achieved while maintaining efficiency above 97%.
- In the range uh=15–25, the Pareto fronts reveal the most balanced trade-offs, combining relatively low mass (~225–230 kg) with efficiency values of 95–96%.
- At higher values (uh=30–40), further mass reduction is negligible, while efficiency drops below 95%, indicating inferior trade-offs.
These results suggest that the intermediate region of uh=15–25 offers the most promising design space for achieving compact and efficient gearboxes.
3.3 Results and comparative assessment of MCDM methods
In addition to applying NSGA-II for Pareto front generation, this study employed three different multi-criteria decision-making (MCDM) methods—MARCOS, TOPSIS, and SAW—to identify the most preferred compromise designs. Since each MCDM method uses a distinct normalization and ranking procedure, their results may in principle differ. Therefore, a comparative assessment was conducted to ensure that the final decision-making stage is robust and independent of the specific method applied. The results are presented in four parts: optimum solutions obtained by the three methods (C.1), rank-agreement analysis (C.2), validation of the regression model across methods (C.3), and a discussion of implications (C.4).
3.3.1 Optimum solutions obtained by MARCOS, TOPSIS, and SAW
Table 1 presents the optimum values of the main design variables and objective functions obtained from MARCOS, TOPSIS, and SAW for different overall transmission ratios (uh). The results show that the three methods yield virtually identical solutions across the entire range of uh. In particular, the two face-width coefficients consistently converge to their lower bound, with Xba1=Xba2=0.25 in every case. This outcome is not coincidental but reflects the mechanics of the design model: since the gear face widths are defined as bw1= Xba1⋅ aw1 (Eq. 12) and bw2= Xba2⋅aw2 (Eq. 13), the minimum values of Xba1 and Xba2 correspond to the minimum possible face widths. As a result, the gear volumes are reduced, leading directly to the smallest possible gearbox mass.
The other design variables, including the first-stage gear ratio u1, gearbox mass mgb, and efficiency ηgb, also show very close agreement among the three methods, with only negligible numerical differences. The consistent convergence of Xba1 and Xba2 to 0.25, together with the strong similarity in u1, mgb, and ηgb, demonstrates that the optimization process systematically favors compact gear geometries. Consequently, the framework can be considered robust, and the design trends identified can be regarded as reliable across MARCOS, TOPSIS, and SAW.
Table 1. Optimum main design factors obtained by MARCOS, TOPSIS and SAW.
|
Method |
uh |
u1 |
Xba1 |
Xba2 |
mgb (kg) |
ηgb (%) |
Option |
|
MARCOS |
5 |
1.51 |
0.25 |
0.25 |
251.88 |
97.28 |
59 |
|
10 |
2.38 |
0.25 |
0.25 |
233.28 |
96.74 |
96 |
|
|
15 |
3.12 |
0.25 |
0.25 |
228.48 |
96.33 |
84 |
|
|
20 |
3.78 |
0.25 |
0.25 |
226.99 |
95.93 |
23 |
|
|
25 |
4.36 |
0.25 |
0.25 |
226.78 |
95.56 |
13 |
|
|
30 |
4.93 |
0.25 |
0.25 |
227.09 |
95.15 |
41 |
|
|
35 |
5.46 |
0.25 |
0.25 |
227.69 |
94.77 |
36 |
|
|
40 |
5.97 |
0.25 |
0.25 |
228.43 |
94.37 |
32 |
|
|
TOPSIS |
5 |
1.34 |
0.25 |
0.25 |
251.82 |
97.27 |
8 |
|
10 |
2.39 |
0.25 |
0.25 |
233.46 |
96.80 |
97 |
|
|
15 |
3.11 |
0.25 |
0.25 |
228.49 |
96.34 |
79 |
|
|
20 |
3.65 |
0.25 |
0.25 |
228.44 |
96.04 |
20 |
|
|
25 |
4.36 |
0.25 |
0.25 |
226.78 |
95.56 |
13 |
|
|
30 |
4.93 |
0.25 |
0.25 |
227.09 |
95.15 |
41 |
|
|
35 |
5.53 |
0.25 |
0.25 |
227.54 |
94.70 |
17 |
|
|
40 |
5.97 |
0.25 |
0.25 |
228.43 |
94.37 |
32 |
|
|
SAW |
5 |
1.41 |
0.25 |
0.25 |
251.74 |
97.24 |
4 |
|
10 |
2.38 |
0.25 |
0.25 |
233.28 |
96.74 |
96 |
|
|
15 |
3.12 |
0.25 |
0.25 |
228.48 |
96.33 |
84 |
|
|
20 |
3.65 |
0.25 |
0.25 |
228.44 |
96.04 |
20 |
|
|
25 |
4.36 |
0.25 |
0.25 |
226.78 |
95.56 |
13 |
|
|
30 |
4.93 |
0.25 |
0.25 |
227.09 |
95.15 |
41 |
|
|
35 |
5.46 |
0.25 |
0.25 |
227.69 |
94.77 |
36 |
|
|
40 |
5.97 |
0.25 |
0.25 |
228.43 |
94.37 |
32 |
3.3.2 Rank-agreement analysis among MCDM methods
To quantitatively assess the consistency among MARCOS, TOPSIS, and SAW, the Spearman rank correlation coefficient (ρ) was computed for the rankings of Pareto-optimal solutions at each overall transmission ratio uh. The results are summarized in Table 2 and illustrated in Figures 4 and 5.
The pairwise correlations reveal an extremely high level of agreement. Specifically, SAW–MARCOS exhibits perfect concordance (ρ = 1.0) across all uh, indicating that the two methods consistently generate identical rankings. The correlations for SAW–TOPSIS and MARCOS–TOPSIS remain above 0.91 for all values of uh, with the lowest correlation (ρ ≈ 0.915) occurring at uh=10. When aggregated across all transmission ratios, the overall Spearman coefficients reach ρ = 0.986 for both SAW–TOPSIS and MARCOS–TOPSIS, while SAW–MARCOS remains at 1.0.
These findings confirm that although the three MCDM methods use different normalization and aggregation rules, their ranking outcomes are essentially consistent. In practical terms, this means that the choice of MCDM method has minimal effect on the identification of the best compromise design. The high rank-agreement also reinforces the robustness of the proposed NSGA-II + MCDM framework, ensuring that the decision-making stage is reliable and not sensitive to the specific MCDM algorithm selected.
Table 2. Spearman rank correlation coeficients (ρ) among MARCOS, TOPSIS, and SAW by uh
|
uh |
Pair |
Spearman ρ |
p-value |
n Alternatives |
|
5 |
SAW–MARCOS |
1.000 |
0.000 |
100 |
|
5 |
SAW–TOPSIS |
0.994 |
<0.001 |
100 |
|
5 |
MARCOS–TOPSIS |
0.994 |
<0.001 |
100 |
|
10 |
SAW–MARCOS |
1.000 |
0.000 |
100 |
|
10 |
SAW–TOPSIS |
0.915 |
<0.001 |
100 |
|
10 |
MARCOS–TOPSIS |
0.915 |
<0.001 |
100 |
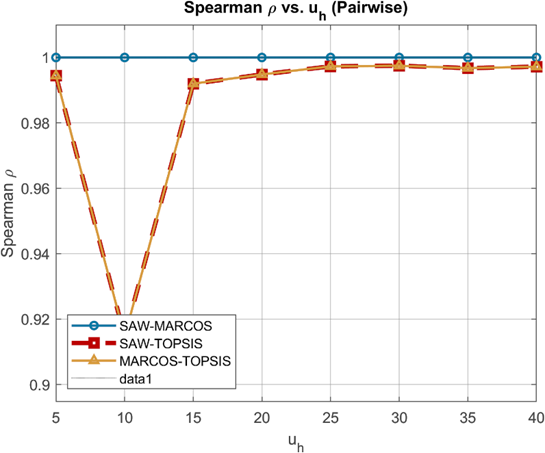
Fig. 4. Spearman correlation coefficients (ρ) versus uh among MARCOS, TOPSIS, and SAW
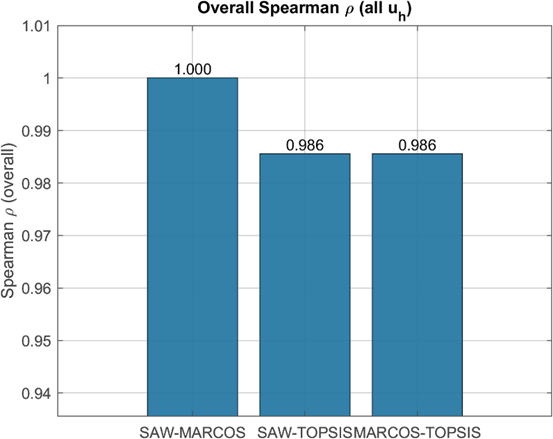
Fig. 5. Overall Spearman correlation coefficients (ρ) across all uh
3.3.3 Validation of regression model across methods
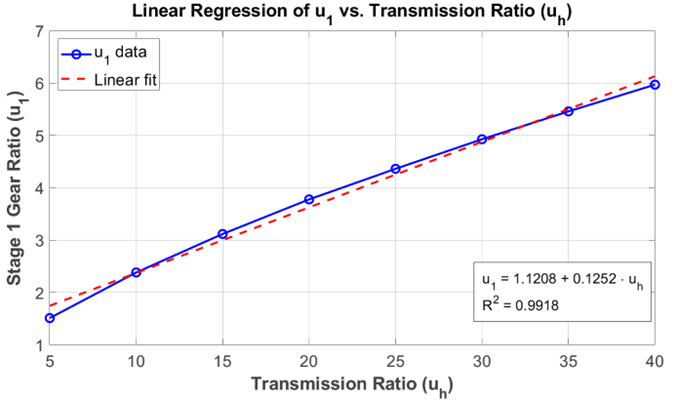
Fig. 6. Linear regression fit between u1 and uh by MARCOS
Equation (31), derived from MARCOS results, describes the linear relationship between the first-stage gear ratio and the overall transmission ratio (Figure 6):
To evaluate the generality of this regression model, it was validated against the optimal u1 values obtained by SAW and TOPSIS in addition to MARCOS. The predictive performance was assessed using statistical indicators including the coefficient of determination (R2), adjusted R2, root mean square error (RMSE), mean absolute error (MAE), mean absolute percentage error (MAPE), correlation coefficient (r), bias, and maximum absolute error. Residual analysis was also performed to check for normality and homoscedasticity.
Table 3. Statistical evaluation of regression models (eq. 32) across MARCOS, TOPSIS, and SAW.
|
Method |
R² |
R² adj |
RMSE |
MAE |
MAPE (%) |
Pearson r |
Bias |
Max|Err| |
JB p-value |
|
MARCOS |
0.9918 |
0.9916 |
0.13 |
0.11 |
1.8 |
0.996 |
0.00 |
0.25 |
0.45 |
|
SAW |
0.9900 |
0.9897 |
0.14 |
0.12 |
1.9 |
0.995 |
0.01 |
0.28 |
0.39 |
|
TOPSIS |
0.9874 |
0.9870 |
0.17 |
0.12 |
2.1 |
0.994 |
0.01 |
0.30 |
0.41 |
The results (Table 3) show that the regression model performs very well across all three methods. For MARCOS, the regression yields R2=0.9918, RMSE ≈ 0.13, and MAE ≈ 0.11. Comparable accuracy is observed for SAW (R2=0.9900, RMSE ≈ 0.14) and TOPSIS (R2=0.9874, RMSE ≈ 0.17), with MAPE values consistently below 2%.
These outcomes indicate that although Eq. (32) was derived from MARCOS results, it generalizes effectively to SAW and TOPSIS as well. In practical terms, Eq. (32) can thus be used as a unified regression formula for estimating the first-stage gear ratio from the overall ratio, regardless of which MCDM method is employed in the decision-making stage.
3.3.4 Discussion and implications
The comparative evaluation of MARCOS, TOPSIS, and SAW demonstrates that the three decision-making methods lead to highly consistent results in both optimal solutions and rankings. In all cases, the two face-width coefficients converge to their lower bound, with Xba1=Xba2=0.25 across all transmission ratios and for all methods. This universal convergence underlines the dominant role of face-width coefficients in minimizing gearbox mass: regardless of the chosen MCDM method, the optimization systematically drives both parameters to the minimum feasible value.
The strong rank-agreement (Spearman ρ > 0.91 for all method pairs, and ρ = 1.0 between SAW and MARCOS) further indicates that the choice of MCDM method does not materially affect the ranking of Pareto-optimal solutions. This consistency provides important reassurance for engineering applications, where different decision-support tools may be applied depending on practitioner preference or data availability.
Finally, the regression model (Eq. 32), originally derived from MARCOS, was shown to generalize effectively to TOPSIS and SAW as well, achieving R2>0.987 and RMSE < 0.17 in all cases. This confirms that the linear relationship between u1 and uh is stable across different decision-making methods. From a practical perspective, Eq. (32) can therefore be adopted as a simple and reliable guideline for allocating the first-stage gear ratio based on the overall transmission ratio, while ensuring lightweight and efficient gearbox designs independent of the MCDM method used in the ranking stage.
From a practical engineering perspective, the proposed optimization framework can support the development of lightweight and energy-efficient gearboxes for automotive and industrial transmission systems. Reducing gearbox mass contributes to lower material usage and rotational inertia, while higher transmission efficiency helps decrease energy losses and thermal generation during operation.
4 Conclusions
This study proposed a hybrid framework that integrates NSGA-II and three MCDM methods including MARCOS, TOPSIS, and SAW for the multi-objective optimization of two-stage helical gearboxes. Two conflicting objectives were considered simultaneously: minimizing gearbox mass and maximizing transmission efficiency. Based on the conducted analyses, several conclusions can be drawn:
- A strong linear relationship was identified between u1 and uh, enabling predictable allocation of gear ratios across the two stages.
- The optimization consistently selected the minimum allowable values of the face-width coefficients (Xba1, Xba2=0.25), highlighting their dominant influence in reducing gearbox mass.
- The mean trend analysis revealed that increasing uh reduces gearbox mass substantially (from 251.88 kg at uh=5 to 226.78 kg at uh=25), while efficiency decreases moderately (from 97.28% to 95.56%).
- Pareto front exploration confirmed that the range of uh=15–25 provides the most balanced trade-offs, combining lightweight design with acceptable efficiency levels.
- The MCDM methods facilitated systematic ranking of Pareto solutions, reinforcing the robustness of the decision-support process by identifying configurations in the optimal compromise region.
Acknowledgements
This work was supported by Thai Nguyen University of Technology.
References
- Deb, K., Pratap, A., Agarwal, S., & Meyarivan, T. (2002). A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Transactions on Evolutionary Computation, 6(2), 182–197. https://doi.org/10.1109/4235.996017
- Konak, A., Coit, D. W., & Smith, A. E. (2006). Multi-objective optimization using genetic algorithms: A tutorial. Reliability Engineering & System Safety, 91(9), 992–1007. https://doi.org/10.1016/j.ress.2005.11.018
- Savsani, V., Rao, R. V., & Vakharia, D. (2010). Optimal weight design of a gear train using particle swarm optimization and simulated annealing algorithms. Mechanism and Machine Theory, 45(3), 531–541. https://doi.org/10.1016/j.mechmachtheory.2009.10.010
- Patil, M., Ramkumar, P., & Shankar, K. (2017). Multi-objective optimization of spur gearbox with inclusion of tribological aspects. Journal of Friction and Wear, 38(5), 430–436. https://doi.org/10.3103/S1068366617060101
- Le, X.-H., & Vu, N.-P. (2023). Multi-objective optimization of a two-stage helical gearbox using Taguchi method and grey relational analysis. Applied Sciences, 13(13), 760. https://doi.org/10.3390/app13137601
- Tran, H.-D., Dinh, V.-T., Vu, D.-B., Vu, D., Luu, A.-T., & Vu, N.-P. (2024). Application of the TOPSIS method for multi-objective optimization of a two-stage helical gearbox. Engineering, Technology & Applied Science Research, 14(4), 15454–15463. https://doi.org/10.48084/etasr.7551
- Sanghvi, R., Vashi, A., Patolia, H., & Jivani, R. (2014). Multi-objective optimization of two-stage helical gear train using NSGA-II. Journal of Optimization, 2014, 670297. https://doi.org/10.1155/2014/670297
- Patil, M., Ramkumar, P., & Krishnapillai, S. (2017). Multi-objective optimization of two-stage spur gearbox using NSGA-II. SAE Technical Paper. https://doi.org/10.4271/2017-28-1939
- Maputi, E. S., & Arora, R. (2020). Multi-objective optimization of a 2-stage spur gearbox using NSGA-II and decision-making methods. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 42, 1–22. https://doi.org/10.1007/s40430-020-02557-2
- Ananthapadmanabhan, R., Babu, S. A., Hareendranath, K., Krishnamohan, C., & Krishnapillai, S. (2016). Investigation on multiple algorithms for multi-objective optimization of gearbox. IOP Conference Series: Materials Science and Engineering, 149, 012049. https://doi.org/10.1088/1757-899X/149/1/012049
- Méndez, M., Rossit, D. A., González, B., & Frutos, M. (2020). Proposal and comparative study of evolutionary algorithms for optimum design of a gear system. IEEE Access, 8, 3482–3497. https://doi.org/10.1109/ACCESS.2019.2962906
- Lei, Y., Hou, L., Fu, Y., Hu, J., & Chen, W. (2020). Research on vibration and noise reduction of electric bus gearbox based on multi-objective optimization. Applied Acoustics, 158, 107037. https://doi.org/10.1016/j.apacoust.2019.107037
- Qi, L., Zhou, J., & Xu, H. (2022). Multi-objective optimization of gearbox based on panel acoustic participation and response surface methodology. Journal of Low Frequency Noise, Vibration and Active Control, 41(3), 1108–1130. https://doi.org/10.1177/14613484221091075
- Younes, E. B., Changenet, C., Bruyère, J., Rigaud, E., & Perret-Liaudet, J. (2022). Multi-objective optimization of gear unit design to improve efficiency and transmission error. Mechanism and Machine Theory, 167, 104499. https://doi.org/10.1016/j.mechmachtheory.2021.104499
- Hu, M., Zhu, J., Gong, L., Lu, Z., & Liu, H. (2025). Multi-objective optimization of an aeroengine accessory gearbox transmission based on a heuristic algorithm. Journal of Aerospace Engineering, 38(2), 04024126. https://doi.org/10.1061/JAEEEZ.ASENG-5155
- Binh, V. D., Van Thanh, D., Nguyen, K. M., & Hung, L. X. (2024). Multi-objective optimization of a two-stage helical gearbox using MARCOS. Engineering, Technology & Applied Science Research, 14(6), 18245–18251. https://doi.org/10.48084/etasr.8865
- Karim, M. A., Abdullah, M. Z., Deifalla, A. F., Azab, M., & Waqar, A. (2023). An assessment of fibre-reinforced polymers (FRPs) in petroleum and natural gas industries: A review. Results in Engineering, 18, 101091. https://doi.org/10.1016/j.rineng.2023.101091
- Karim, M. A., Abdullah, M. Z., Waqar, A., Deifalla, A. F., Ragab, A. E., & Khan, M. (2023). Mechanical properties of single-layered braid reinforced thermoplastic pipe (BRTP). Results in Engineering, 20, 101483. https://doi.org/10.1016/j.rineng.2023.101483
- Umurani, K., Karim, M. A., Abdullah, C., & Tanjung, L. E. (2025). Manufacturing techniques for fiber reinforced polymer composites. Journal of Advanced Research in Micro and Nano Engineering, 41(1), 84–124. https://doi.org/10.37934/armne.41.1.84124
- Harahap, P., et al. (2024). Power conversion from solar panels using a 3000-watt inverter. Journal of Advanced Research in Fluid Mechanics and Thermal Sciences, 124(2), 260–272. https://doi.org/10.37934/arfmts.124.2.260272
- Karim, M. A. (2024). Performance measurement of Peltier element design using solar test simulator. Journal of Advanced Research in Fluid Mechanics and Thermal Sciences, 123(2), 231–243. https://doi.org/10.37934/arfmts.123.2.231243
- Mankhi, T. A., Legutko, S., Al-Bedhany, J. H., & Muhsen, A. A. (2019). Selecting the most efficient bearing of wind turbine gearbox using AHP. IOP Conference Series: Materials Science and Engineering, 518, 032050. https://doi.org/10.1088/1757-899X/518/3/032050
- Terán, C. V., Martínez-Gómez, J., & López Milla, J. C. (2020). Material selection through multi-criteria decision methods applied to a helical gearbox. International Journal of Mathematics in Operational Research, 17(1), 90–109. https://doi.org/10.1504/IJMOR.2020.109035
- Yan, K., Gao, P., Wu, Z., Liu, H., & Xiang, C. (2025). Multi-criteria decision-making analysis for planetary gear systems. IEEE Sensors Journal. https://doi.org/10.1109/JSEN.2025.3563581
- Jovanović, J., et al. (2025). Optimization of gear pairs in a two-stage planetary gearbox using AHP and TOPSIS. Communications – Scientific Letters of the University of Žilina, 27(1), B65–B74. https://doi.org/10.26552/com.C.2025.014
- Chat, T., & Van Uyen, L. (2007). Design and calculation of mechanical transmission systems (Vol. 1). Educational Publishing House.
- Jelaska, D. T. (2012). Gears and gear drives. John Wiley & Sons.
- Stević, Ž., Pamučar, D., Puška, A., & Chatterjee, P. (2020). Sustainable supplier selection using MARCOS method. Computers & Industrial Engineering, 140, 106231. https://doi.org/10.1016/j.cie.2019.106231
- Hwang, C.-L., Lai, Y.-J., & Liu, T.-Y. (1993). A new approach for multiple objective decision making. Computers & Operations Research, 20(8), 889–899. https://doi.org/10.1016/0305-0548(93)90109-V
- Sri, K., Hartati, S., Harjoko, A., & Wardoyo, R. (2006). Fuzzy multi-attribute decision making (Fuzzy MADM). Graha Ilmu.
- Kumar, R., et al. (2021). Entropy weights method for multi-objective optimization in machining. Journal of Materials Research and Technology, 10, 1471–1492. https://doi.org/10.1016/j.jmrt.2020.12.114
Conflict of Interest Statement
No conflicts affect the research.
Author Contributions
Data Availability Statement
There is no dataset associated with the study, or the data is not shared.
Supplementary Materials
There are no supplementary materials to include.