Volume 24 article 1339 pages: 367-377
Received: Dec 12, 2025 Accepted: Apr 14, 2026 Available Online: Apr 30, 2026 Published: May 31, 2026
DOI: 10.5937/jaes0-63429
MULTI-OBJECTIVE OPTIMIZATION WITH GENETIC ALGORITHM OF AIR SUSPENSION SYSTEM FOR ENHANCING RIDE COMFORT AND ROAD-HOLDING PERFORMANCES
Abstract
This study presents a systematic investigation of air suspension control strategies for vehicular applications, employing computational optimization techniques to enhance both ride comfort and road holding performances. A comprehensive simulation framework was developed, incorporating a quarter-truck model with nonlinear air spring dynamics subjected to spectrally rich road excitations. The research methodology integrates conventional PID control with multi-objective genetic algorithm optimization to determine Pareto-optimal solutions for conflicting performance criteria. Extensive numerical simulations reveal that the optimized controller achieves significant improvements in vibration attenuation (58.4% reduction in sprung mass displacement) while maintaining superior road contact characteristics (41.5% enhancement in tire-road contact force) compared to a passive system. The analysis provides quantitative insights into the fundamental trade-space between ride comfort-oriented and stability-focused control objectives, demonstrating that intelligent optimization approaches can effectively navigate these design compromises. Furthermore, the results establish practical boundaries for control system performance under realistic operating conditions, offering valuable guidelines for automotive suspension system design. The technical contributions include novel control architectures, advanced performance evaluation metrics, and a rigorous methodology for controller optimization in nonlinear air suspension systems. These findings advance the state-of-the-art in vehicle dynamics control and identify several promising avenues for future research in adaptive control systems and hybrid optimization algorithms.
Highlights
- Investigated the relationship between indirect tensile strength and indirect tensile stiffness modulus in SBS-modified asphalt mixtures.
- Decreasing ITS and ITSM with increasing temperature reflects reduced tensile resistance and diminished load-spreading ability.
- ITS and ITSM are correlated and play complementary roles in mixture performance.
Keywords
Content
1 Introduction
The increasing demand for enhancing ride comfort, road handling, and operational safety in truck has led to continuous innovation in suspension system design. Trucks, which often operate under fluctuating load conditions and traverse uneven road surfaces, particularly benefit from suspension systems capable of adapting to dynamic environments [1, 2]. Air suspension systems, utilize compressed air chambers instead of traditional leaf springs, have emerged as a promising solution, offering better adaptability, self-leveling capability, and improved vibration isolation compared to traditional passive suspensions. However, due to their intrinsic nonlinearities and time-varying dynamics, controlling such systems remains a complex challenge, especially when seeking optimal performance across multiple conflicting objectives. To address the nonlinear, time-varying characteristics of these systems and improve control efficiency, numerous intelligent control strategies have been proposed and evaluated through both simulation and experimental methods [3, 4].
Several studies have applied fuzzy logic controllers to electronically controlled air suspension (ECAS) systems, utilizing inputs such as suspension deflection error and its rate of change to regulate the PWM duty cycle for actuator control. These approaches, as implemented in real-time hardware-in-the-loop simulations using dSPACE platforms [5], have demonstrated effective damping force regulation. Enhancements were also observed when combining fuzzy logic with PID strategies that applied to a 6×4 heavy vehicle reduced vertical acceleration and suspension dynamic [6]. Similarly, a fuzzy fractional-order PIλDμ controller applied to a nine-degree-of-freedom armored vehicle model significantly outperformed conventional PID and fuzzy-PID approaches in terms of ride comfort [7].
Optimization-based control techniques have also shown promise. Studies integrating Particle Swarm Optimization (PSO) with LQR controllers have achieved reductions of 31% in displacement amplitude and 85% in settling time under random vibration conditions (5–20 Hz), along with a 30% decrease in sprung mass acceleration [8]. Likewise, Seeker Optimization Algorithm (SOA)-optimized PID controllers applied to transverse interconnected ECAS demonstrated up to 42.4% reductions in roll/pitch angles and improved response characteristics over conventional methods [9]. Genetic algorithms (GA) have been used to optimize both fuzzy-PID parameters [10] and air spring design variables [11], resulting in significant improvements in ride comfort and road safety margins across varied road conditions.
Recent advances have also explored adaptive and model-based control strategies. Adaptive Neuro-Fuzzy Inference Systems [12], adaptive neural network controllers [13], and adaptive control algorithms accounting for system uncertainties [14] have each demonstrated enhanced height tracking performance and reduced body acceleration under random road excitations. Nonlinear Model Predictive Control [15] and Hybrid Model Predictive Control [16] frameworks have further improved ride height accuracy and system responsiveness, especially under variable payload and operational conditions.
Innovative structural improvements have complemented control advancements. A dual-chamber air suspension design independently managing ride height and stiffness outperformed traditional single-chamber systems in tunability and posture control [17]. Energy-efficient designs, such as those employing active interconnected air springs with strategic airflow management, achieved a 72% reduction in roll angle and a 46% reduction in energy consumption [18]. Similarly, pressure optimization in tractor semi-trailers based on dynamic road stress led to a 20% decrease in road dynamic forces compared to leaf springs [19].
To address vehicle posture stability and ride height accuracy, several studies have combined co-simulation environments (e.g., AEMSim-Simulink) with dedicated controllers [20], or developed layered hybrid control structures integrating magneto-rheological dampers and solenoid valves [21]. Furthermore, sliding mode controllers [22] and nonlinear air spring models validated via experiments [7] have enabled improved robustness and handling across diverse road profiles.
To address the limitations of conventional control strategies in ECAS systems, this study introduces a novel multi-objective GA-based optimization framework for PID controller tuning, specifically tailored to the dynamic behavior of nonlinear air suspension systems in trucks. The proposed approach aims to enhance ride comfort and road holding by simultaneously minimizing vertical acceleration, and dynamic tire load under diverse road and loading conditions.
A comprehensive nonlinear quarter-truck model is developed, incorporating air spring thermodynamics, actuator dynamics, and external disturbances to accurately reflect real-world behavior. The PID controller parameters are optimized using a GA-driven multi-objective cost function, eliminating the reliance on manual tuning while improving robustness and adaptability. Simulation scenarios include both smooth and rough road profiles to assess controller performance under varied operating conditions. The main outstanding contributions of this study are as follows:
- Development of a nonlinear model of a quarter-truck using ECAS system suitable for control and optimization studies.
- Formulation of a multi-objective performance index for PID parameters optimization using GA.
- Design and implementation of a GA-optimized PID control strategy to suppress vibrations and enhance ride comfort quality.
- Comparative analysis of the proposed GA-PID controller against conventional PID methods under road excitations.
Simulation results confirm that the GA-optimized PID controller delivers superior performance in terms of ride comfort and tire–road contact force maintenance, demonstrating the effectiveness of evolutionary optimization for complex suspension systems. This research contributes to the advancement of intelligent, adaptive control strategies in commercial vehicle applications, offering a scalable and computationally efficient solution for real-world implementation.
This research is structured as follows: Section 2 presents the controller design methodology for the quarter-truck model with air suspension system, incorporating both conventional PID control and multi-objective optimization approaches to determine optimal control parameters for diverse performance criteria. Section 3 evaluates controller performance through numerical simulations under standard road excitation conditions, with comprehensive analysis of system responses. The paper concludes with Section 4, which summarizes key findings, discusses practical implications, and identifies promising directions for future research.
1 Materials and methods
1.1 Truck modelling with air spring actuator
Accurate dynamic modeling of truck suspension systems is essential for analyzing ride comfort, road holding, and system controllability. Among various suspension types, the air spring system - often coupled with an auxiliary accumulator - offers significant adaptability and damping characteristics, especially under varying load conditions. In this study, the authors focus on modeling a quarter-truck system equipped with an air spring and a connected accumulator, considering both thermodynamic and fluid dynamic behaviors.
The air spring system, as shown in Fig. 1, consists of a primary air chamber and an auxiliary accumulator linked via a pipeline. The airspring system dynamics are governed by fundamental physical assumptions, each supported by empirical evidence and theoretical analysis. The compressed air behavior follows an extended polytropic relationship that accounts for both thermal and dynamic effects:
where the polytropic index $n$ varies as:
In which, the temperature dependence through coefficient $\alpha_T$ , which models heat transfer during rapid compression/expansion cycles $\alpha_T = 0.05 \div 0.15 \, K^{-1}$ , and the rate-dependent behavior via , accounting for kinetic effects in transient operations. The baseline index transitions between 1.0 (isothermal limit) and 1.4 (adiabatic limit) depending on system configuration.
Gas flow through interconnecting pipelines operates firmly in the turbulent regime, as confirmed by Reynolds number analysis:
Following that, the pressure drop follows quadratic velocity dependence $\Delta P \propto v^2$ , flow separation effects become negligible for length-to-diameter ratios $\frac{L_t}{D_h} > 30$ and the friction factor becomes Reynolds-number dependent per Colebrook's equation:
The mass distribution of gas along the pipeline is modeled with spatial modulation:
Assuming adiabatic compression and expansion of air, the pressures inside the chambers follow:
where $\gamma$ is the adiabatic index.
with $K_e = \frac{P_{\text{ref}} A_p^2 K}{V_{c0} + V_{r0}}$; $K_c = K_e \left(\frac{V_{r0}}{V_{c0}}\right)$; $\eta = \frac{A_t}{A_p} \cdot \frac{V_{c0} + V_{r0}}{V_{r0}} \gamma$.
The dynamic equation for the distribution of gas mass inside the pipeline can be written as follows:
By combining the mechanical and thermodynamic subsystems, the complete nonlinear dynamics of the truck’s air suspension can be represented. This system of differential equations can then be linearized around an operating point or used directly in a numerical simulation or control optimization framework.
where Lt is the connecting pineline length; Ap is the effective area; Vc0 is the initial chamber volume.
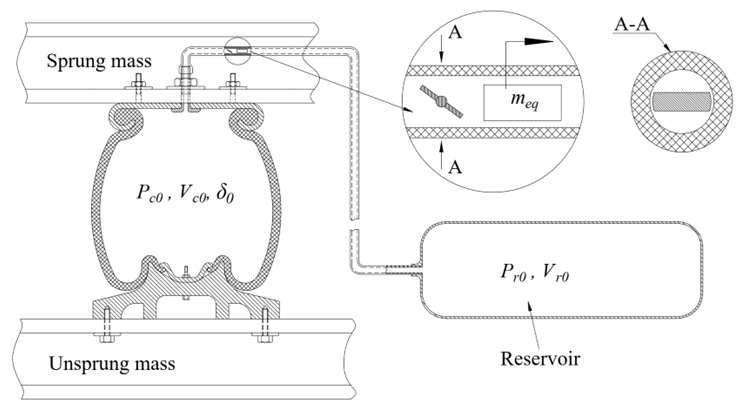
Fig. 1. Modelling of an air spring actuator in a quarter truck model
Table 1. Parameters for the air in airspring.
|
Symbol |
Description |
Value, Unit |
|
\( K \) |
Polytropic coefficient |
1.4 |
|
\( \beta \) |
Velocity exponent |
0.5 |
|
\( \xi \) |
Turbulent flow coefficient |
0.3 |
|
\( \rho \) |
Air density |
1.225 kg/m³ |
As illustrated in Fig. 1, the quarter-truck model consists of a sprung mass and an unsprung mass with their respective vertical displacements denoted by and , respectively. These masses are interconnected through a damper characterized by a damping coefficient and an air spring actuator, in which the equivalent air mass flow within the chamber is governed by the nonlinear characteristics described in equation (9). The tire-road interaction is modeled as a linear spring with stiffness coefficient , responding to the road disturbance . The model is simplified in Fig. 2, and the governing equations for the quarter-truck system with the air suspension are presented in equation (10).
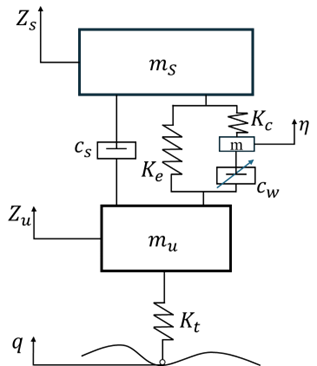
Fig. 2. An airspring actuator on a quarter truck model
2.2 Genetic algorithm for PID problem
The PID (Proportional–Integral–Derivative) controller is one of the most widely used control strategies in engineering due to its simplicity, robustness, and effectiveness in regulating dynamic systems. In the context of vehicle suspension, the PID controller aims to minimize oscillations and enhance ride comfort by adjusting the control force based on position and velocity feedback [23, 24]. This study employs a multi-objective genetic algorithm (MOGA) to optimally tune the PID controller parameters for air suspension system in truck. The primary aim is to improve both ride comfort and dynamic road-holding capability under various operating conditions. The air suspension system, being nonlinear and highly coupled, benefits significantly from evolutionary optimization techniques that can efficiently explore high-dimensional and non-convex solution spaces.
The PID controller parameters - proportional gain , integral gain , and derivative gain - were optimized simultaneously to minimize two conflicting performance objectives:
- The vertical acceleration of the sprung mass , which affects passenger comfort.
- The vertical acceleration of the unsprung mass , which is related to road grip and tire wear.
The multi-objective problem is formally defined as:
Subject to:
and constrained by:
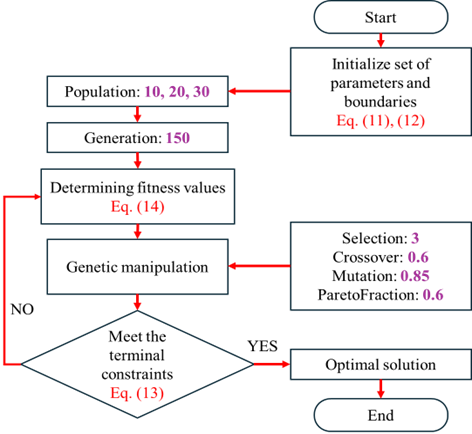
To address the defined optimization problem, MATLAB's gamultiobj function was utilized, incorporating the real-time Pareto front visualization tool gaplotpareto to monitor the evolutionary progress [25]. The population sizes are selected to balance computational efficiency and convergence performance, given that each fitness evaluation involves nonlinear dynamic simulation. Although larger populations may improve global exploration, the chosen sizes are sufficient to ensure consistent convergence and reliable comparative analysis of controller performance. To evaluate the impact of population diversity on convergence behavior and solution quality, three cases were considered with varying population sizes:
- Case 1: population size = 10,
- Case 2: population size = 20,
- Case 3: population size = 30.
Each configuration was executed with a maximum of 150 generations. To ensure consistent exploration and exploitation across all runs, the crossover fraction and Pareto fraction were both fixed at 0.6. This balance was chosen to maintain genetic diversity while facilitating the preservation of high-quality, non-dominated solutions throughout the optimization process. The fitness function was formulated as follows:
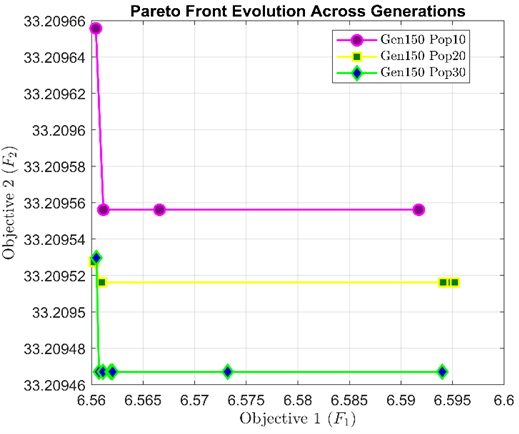
This bi-objective formulation captures the essential trade-off in PID controllers’ air suspension design: increasing comfort may reduce road contact stability, and vice versa. By applying MOGA, the Pareto front of non-dominated solutions was obtained, as figures out in Fig. 3, each representing a viable configuration for a specific design priority. Only feasible solutions that satisfied the nonlinear constraints were retained in the final front.
|
a) |
b) |
Fig. 3. The GA for PID problem flow (a) and the cost function (b)
3 Results and discussion
The road disturbance profile employed in this study, as illustrated in Fig. 4, is formulated as a structured non-stationary excitation signal designed to capture key characteristics of real-world road irregularities while maintaining controllability and repeatability for comparative analysis. The excitation profile is mathematically defined as follows:
The characteristics of the road disturbance from (15) are defined in Table 2.
Table 2. Values for definding the road disturbance.
|
Symbol |
Description |
Value |
Unit |
|
\( A_i \) |
Amplitude components |
0.1 |
m |
|
\( \alpha_i \) |
Decay constants for transient features |
0 |
- |
|
\( f_i \) |
Frequency range of typical road disturbances |
5 |
rad/s |
|
\( \phi_i \) |
Random phase shifts ensuring non-periodicity |
0 |
rad |
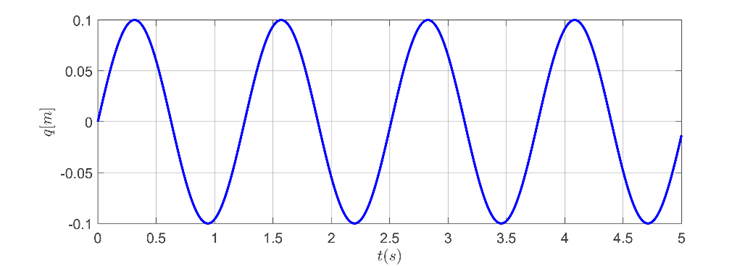
Fig. 4. Road exogenous on simulation
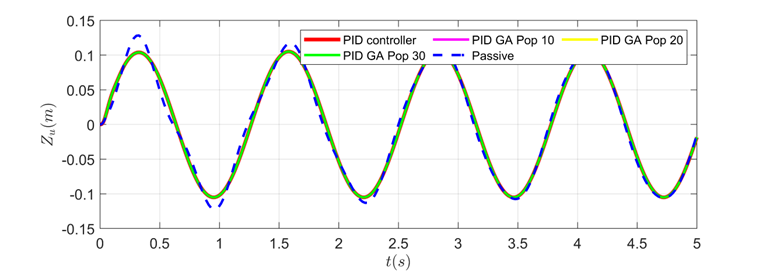
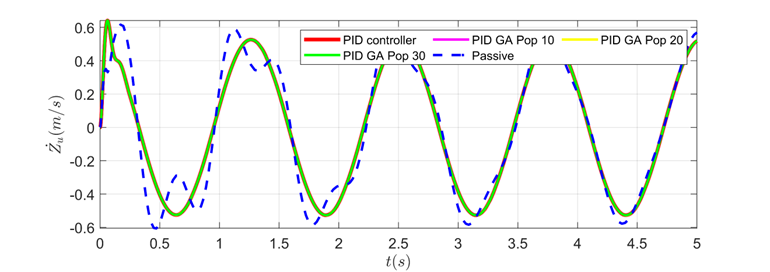
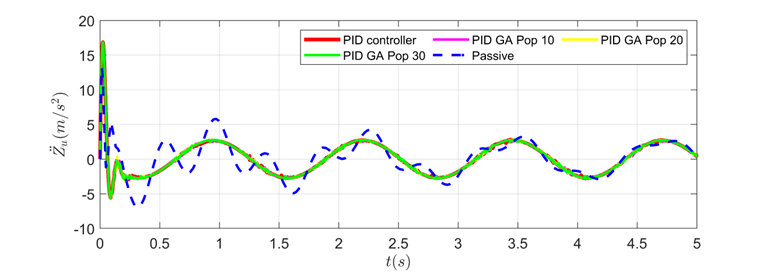
Fig. 5 evaluates the efficacy of Passive (blue line), PID (red line), and GA-based PID for air suspension control systems by analyzing their impact on key ride comfort metrics: vertical displacement ( ), vertical velocity ( ), and vertical acceleration ( ). The GA-based PID with 3 models as the population varying of 10, 20, 30 illustrates in purple, yellow and green lines, respectively. The root mean square (RMS) values reveal substantial performance differences among the control strategies [11]. The GA-optimized controller with a population size of 10 (GA-Pop10) demonstrates particularly noteworthy performance, achieving 58.37% and 33.08% reductions in vertical displacement and acceleration respectively compared to the passive system. While the PID controller provides consistent improvements across all measured parameters, the GA-Pop10 implementation shows superior performance in displacement and acceleration mitigation. The velocity metric ( ), representing the sprung mass velocity, shows more nuanced results - the PID controller maintains a 27.67% improvement over the passive system, whereas GA-Pop10 exhibits a marginal 5.20% degradation relative to PID. This suggests a potential trade-off between displacement control and movement rate management in the GA-optimized solution.
Notably, increasing the GA population size beyond 10 yields diminishing returns, with GA-Pop30 showing reduced effectiveness in certain metrics. These findings suggest that while GA-optimized controllers can significantly enhance ride comfort by reducing both low-frequency vibrations (displacement) and high-frequency oscillations (acceleration), careful parameter selection is crucial to maintain balanced performance across all comfort indicators. The results underscore the potential of intelligent control algorithms in advanced suspension systems while highlighting the need for multi-objective optimization in controller design.
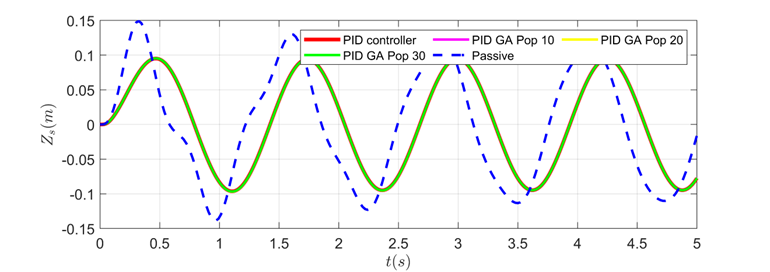
(a) Spung mass displacement
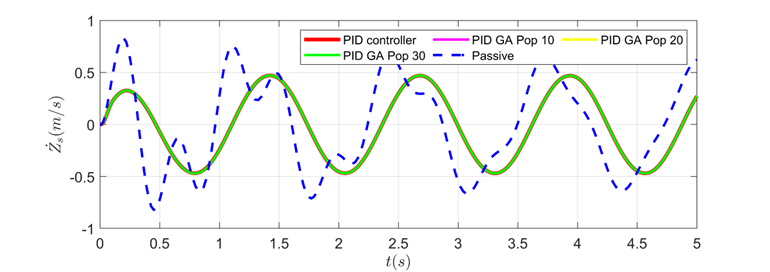
(b) Spung mass velocity
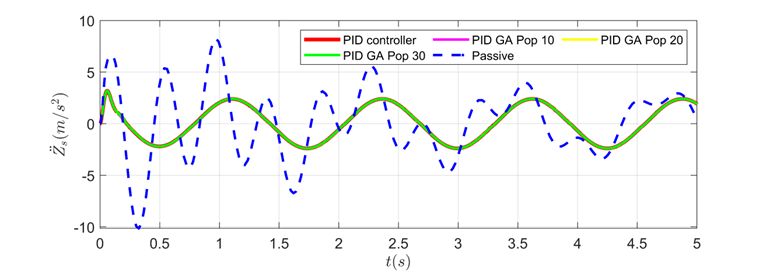
(c) Spung mass acceleration
Fig. 5. Time respond of the spung mass due to road disturbance
In addition to ride comfort, the suspension system's ability to maintain optimal tire contact with the road - critical for vehicle stability and safety - was evaluated through the dynamic tire load metrics: tire displacement ( ), tire velocity ( ), and tire acceleration ( ) which are displayed in Fig. 6. The RMS values indicate that the GA-Pop10 controller achieves superior road-holding performance compared to both passive and PID control systems. Specifically, it reduces tire displacement by 28.70% relative to the passive system while maintaining a 14.44% improvement in tire velocity. However, the PID controller exhibits a marginal advantage in minimizing unsprung mass acceleration, suggesting that while GA optimization enhances overall road contact, PID may offer better transient response in high-frequency disturbances.
Interestingly, larger GA population sizes (Pop20 and Pop30) show progressive improvements in unsprung mass displacement reduction (up to 33.58% for GA-Pop30), but this comes at the expense of slightly degraded performance in unsprung mass velocity and acceleration control. This trade-off implies that while evolutionary algorithms can effectively optimize steady-state road-holding characteristics, fine-tuning may be necessary to ensure dynamic stability under varying road conditions.
(a) Unspung mass displacement
(b) Unspung mass velocity
(c) Unspung mass acceleration
Fig. 6. Time respond of the unspung mass due to road disturbance.
(a)
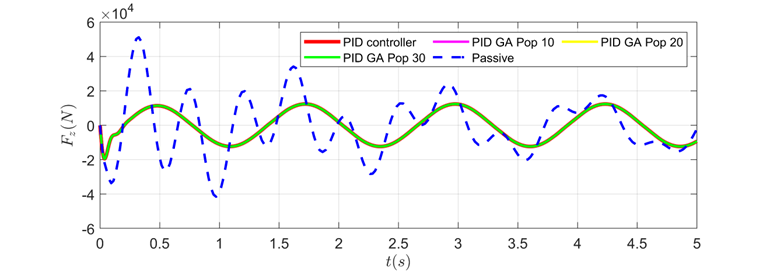
(b)
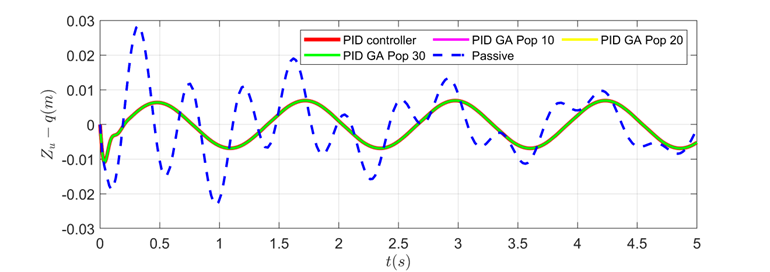
Fig. 7. Time respond of the tyre-road deflection (a) and the dynamic load (b)
The dynamic tire load ( ) illustrated in Fig. 7, a critical indicator of road-holding capability, was evaluated to assess the suspension system's effectiveness in maintaining consistent wheel-to-road contact under varying conditions. The results demonstrate that the GA-Pop10 controller significantly reduces dynamic load fluctuations compared to the passive system, achieving a 41.51% improvement in RMS values. While the PID controller also enhances road-holding performance (42.04% improvement over Passive model), the GA-optimized solution provides more stable load distribution, particularly in transient scenarios. However, the performance gains diminish with larger GA populations, as GA-Pop30 shows only marginal improvement (42.50%) over PID model, suggesting an optimal trade-off between computational complexity and control precision. These findings indicate that intelligent control strategies, particularly GA with moderate population sizes, can effectively minimize dynamic load variations, thereby improving traction and vehicle stability without compromising ride comfort. Further refinement of the fitness function to prioritize minimization could yield additional improvements in road-holding performance.
Table 3. Comparision the RMS values and reductions of different models
For the velocity of the unsprung mass, all control strategies - both PID and GA-based - exhibit higher RMS values compared to the passive system, with increases ranging from 13.03% to 19.05%. However, as illustrated in Fig. 7b, the amplitude differences remain relatively small. This suggests that while the controllers enhance overall ride comfort and sprung mass dynamics, they introduce a slight compromise in suppressing unsprung mass velocity - likely reflecting the inherent trade-off between ride comfort and road-holding performance.
4 Conclusion
This study investigates the air suspension system in heavy-duty trucks, beginning with the dynamic modeling of the air spring actuator mechanism based on kinematic equations. A controlled air suspension model utilizing a PID controller is subsequently developed to enhance system performance.
The results demonstrate that the active air suspension system, optimized using a Genetic Algorithm (GA), significantly outperforms both passive and conventional PID-controlled systems in terms of ride comfort and road-holding capabilities. Specifically, the GA-based controller achieves improvements of up to 58.37% in ride comfort and 41.51% in roadholding compared to the passive system. Although the PID controller remains effective for specific transient responses, the GA-optimized system with a population size of 10 (GA-Pop10) delivers superior overall performance, offering a well-balanced trade-off between vibration suppression and stability. Notably, increasing the population size beyond 10 results in marginal performance gains, indicating an optimal point for computational efficiency.
These findings underscore the potential of GA-based optimization in the development of advanced air suspension control systems. Future research will focus on incorporating actuator dynamics, such as valve delays and force saturation, to develop a more explicit and detailed representation of the air suspension system, while also exploring adaptive GA tuning techniques and hybrid control architectures to further enhance performance and robustness under varying real-world operating conditions.
Acknowledgements
This research was funded by the Electric Power University under project code DTKHCN.52/2025.
References
- Atindana, V. A., Xu, X., Nyedeb, A. N., Quaisie, J. K., Nkrumah, J. K., & Assam, S. P. (2023). The evolution of vehicle pneumatic vibration isolation: A systematic review. Shock and Vibration, 2023, 1–23. https://doi.org/10.1155/2023/1716615
- Pradhan, P., & Singh, D. (2023). Review on air suspension system. Materials Today: Proceedings, 81(2), 486–488. https://doi.org/10.1016/j.matpr.2021.03.640
- Maljković, M., Blagojević, I., Popović, V., & Stamenković, D. (2018). Impact of the damper characteristics on the behavior of suspension system and the whole vehicle. Journal of Applied Engineering Science, 16(3), 349–357. https://doi.org/10.5937/jaes16-17342
- Demić, M. (2020). A contribution to design of semiactive vehicle suspension system. Istraživanja i projektovanja za privredu, 3(9), 7–16.
- Xia, Q., Bai, R., & Wang, H. (2018). Fuzzy control of damping force in the air suspension system. In 2018 5th International Conference on Information, Cybernetics, and Computational Social Systems (ICCSS) (pp. 328–330). IEEE. https://doi.org/10.1109/ICCSS.2018.8572384
- Bai, X., Lu, L., Zhang, C., & Geng, W. (2023). Research on height adjustment characteristics of heavy vehicle active air suspension based on fuzzy control. World Electric Vehicle Journal, 14(8), 210. https://doi.org/10.3390/wevj14080210
- Wang, J., Lv, K., Wang, H., Guo, S., & Wang, J. (2022). Research on nonlinear model and fuzzy fractional order PIλDμ control of air suspension system. Journal of Low Frequency Noise, Vibration and Active Control, 41(2), 712–731. https://doi.org/10.1177/14613484211051854
- S., G. P., & K., M. M. (2019). A contemporary adaptive air suspension using LQR control for passenger vehicles. ISA Transactions, 93, 244–254. https://doi.org/10.1016/j.isatra.2019.02.031
- Cao, K., Li, Z., Gu, Y., Zhang, L., & Chen, L. (2021). The control design of transverse interconnected electronic control air suspension based on seeker optimization algorithm. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 235(8), 2200–2211. https://doi.org/10.1177/0954407020984667
- Zhang, S., Li, M., Li, J., Xu, J., Wang, Z., & Liu, S. (2024). Research on ride comfort control of air suspension based on genetic algorithm optimized fuzzy PID. Applied Sciences, 14(17), 7787. https://doi.org/10.3390/app14177787
- Hung, T. M. (2022). Optimal selection for an air suspension system on buses through a unique high level parameter in genetic algorithms. Heliyon, 8(3), e09059. https://doi.org/10.1016/j.heliyon.2022.e09059
- Shalabi, M. E., Fath Elbab, A. M. R., El-Hussieny, H., & Abouelsoud, A. A. (2021). Neuro-fuzzy volume control for quarter car air-spring suspension system. IEEE Access, 9, 77611–77623. https://doi.org/10.1109/ACCESS.2021.3081872
- Jiang, X., & Cheng, T. (2023). Design of a BP neural network PID controller for an air suspension system by considering the stiffness of rubber bellows. Alexandria Engineering Journal, 74, 65–78. https://doi.org/10.1016/j.aej.2023.05.012
- Zhang, J., Yang, Y., & Hu, C. (2023). An adaptive controller design for nonlinear active air suspension systems with uncertainties. Mathematics, 11(12), 2626. https://doi.org/10.3390/math11122626
- Ma, X., Wong, P. K., Zhao, J., Zhong, J.-H., Ying, H., & Xu, X. (2018). Design and testing of a nonlinear model predictive controller for ride height control of automotive semi-active air suspension systems. IEEE Access, 6, 63777–63793. https://doi.org/10.1109/ACCESS.2018.2876496
- Sun, X., Cai, Y., Wang, S., Liu, Y., & Chen, L. (2016). A hybrid approach to modeling and control of vehicle height for electronically controlled air suspension. Chinese Journal of Mechanical Engineering, 29(1), 152–162. https://doi.org/10.3901/CJME.2015.1202.141
- Karimi Eskandary, P., Khajepour, A., Wong, A., & M. A. (2016). Analysis and optimization of air suspension system with independent height and stiffness tuning. International Journal of Automotive Technology, 17(5), 807–816. https://doi.org/10.1007/s12239-016-0079-9
- Nazemian, H., & Masih-Tehrani, M. (2020). Development of an optimized game controller for energy saving in a novel interconnected air suspension system. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 234(13), 3068–3080. https://doi.org/10.1177/0954407020927147
- Van Tan, V., Tu, D. T., Tat Thang, P., Mihaly, A., & Gaspar, P. (2025). Utilizing dynamic road stress factor to determine optimal pressure for air suspension system on tractor semi-trailer to minimize dynamic tire forces impacting on road. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering. https://doi.org/10.1177/09544070251321033
- Zhang, H., Zhang, H., Zhao, L., Ou, C., Liu, Y., & Shan, X. (2024). Height control strategy design and simulation of electronic control air suspension for trucks. World Electric Vehicle Journal, 15(6), 273. https://doi.org/10.3390/wevj15060273
- Hu, Q., Lu, W., & Jiang, J. (2022). Dynamic modeling and adjustable damping layered control of air suspension hybrid system. Australian Journal of Mechanical Engineering, 20(1), 1–13. https://doi.org/10.1080/14484846.2019.1643643
- Guowei, D., Wenhao, Y., Zhongxing, L., Khajepour, A., & Senqi, T. (2020). Sliding mode control of laterally interconnected air suspensions. Applied Sciences, 10(12), 4320. https://doi.org/10.3390/app10124320
- Johnson, M. A., & Moradi, M. H. (2005). PID control: New identification and design methods. Springer.
- Vilanova, R., & Visioli, A. (2012). PID control in the third millennium: Lessons learned and new approaches. Springer.
- Van Tan, V., Sename, O., Gaspar, P., & Do, T. T. (2024). Active anti-roll bar control design for heavy vehicles. Springer. https://doi.org/10.1007/978-981-97-1359-2
Conflict of Interest Statement
There are no conflicts affecting the research.
Author Contributions
Data Availability Statement
There is no dataset associated with the study or data is not shared.
Supplementary Materials
There are no supplementary materials to include.