Volume 24 article 1341 pages: 394-406
Received: Dec 18, 2025 Accepted: May 15, 2026 Available Online: May 30, 2026 Published: May 31, 2026
DOI: 10.5937/jaes0-63568
REVIEW OF FAILURE MODES IN DYNAMIC POSITIONING VESSEL OPERATIONS
Abstract
Dynamic positioning (DP) is a key enabling technology for offshore drilling, subsea construction, and renewable energy operations, yet loss-of-position incidents continue to pose significant safety, environmental, and financial risks. This paper reviews failure modes in DP vessel operations over the 2015–2024 period by integrating a structured literature review, bibliometric co-occurrence analysis, and content analysis of incident and reliability studies. A PRISMA-style screening applied to Scopus and complementary databases identifies 26 relevant publications, of which 10 are selected as core analytical studies addressing DP failure mechanisms and reliability modelling. The synthesis indicates that technical failures in power generation and distribution, thruster and propulsion systems, and sensor and reference subsystems dominate DP incidents in drilling and construction operations. In addition, human and organisational factors are directly involved in approximately 20% of reported incidents based on a dataset of 311 DP cases, with higher proportions (up to 29.5%) observed in drilling and diving operations where human involvement is more direct. The variation across studies reflects differences in operational context, incident classification methodology, and dataset scope. Incident-based risk analyses further show that power generation failures and adverse environmental conditions disproportionately contribute to expected economic losses. Quantitative reliability and RAM studies consistently report lower failure probabilities for DP3 architectures compared with DP2, while identifying components such as busbars and wind sensors as critical risk contributors. Recent advances, including Bayesian networks, Monte Carlo–based RAM modelling, and the Dynamic Positioning Reliability Index (DP-RI), as well as LSTM-based real-time reliability prediction, demonstrate the potential of data-driven methods to combine incident statistics, equipment failure data, and operational conditions into dynamic risk indicators. Building on these insights, this paper proposes a hybrid framework integrating incident analytics, RAM modelling, and AI-enabled condition monitoring to support more resilient DP operations and to inform future research on human reliability, predictive maintenance, and decision-support integration with class and industry guidance.
Highlights
- DP failures are driven by cascading interactions between power, thrusters, sensors, and human operators.
- Incident data show power system failures dominate economic risk, despite low failure probabilities in DP3 vessels.
- Bibliometric analysis reveals a shift from static reliability toward data-driven and predictive DP risk models.
- A hybrid framework integrating RAM analysis and AI-based monitoring is proposed to enhance DP systems resilience.
Keywords
Content
1 Introduction
Dynamic Positioning (DP) systems are critical technologies in modern offshore operations, enabling vessels such as Platform Supply Vessels (PSVs), drilling units, and subsea construction vessels to maintain their position and heading without anchoring, even under dynamic ocean and weather conditions ([1, 2]). Their reliability and safety are paramount because failures in DP systems may result in severe consequences, including asset damage, accidents involving divers and Remotely Operated Vehicles (ROVs), environmental pollution, or even loss of life ([3, 4]). Therefore, the International Maritime Organization (IMO), the International Marine Contractors Association (IMCA), and major classification societies mandate structured reliability assessments, such as Failure Modes and Effects Analysis (FMEA), redundancy testing, and DP proving trial [5].
Despite these regulations, DP incidents continue to occur, often caused by technical and human related factors [6]. Statistical data from industry reports indicate that major contributors to DP incidents include thruster and propulsion failures, power supply losses, sensor and position reference system malfunctions, as well as human error [7]. Recent surveys on DP systems reliability emphasize that while reliability modelling methods such as FMEA, fault tree analysis, Markov chains, and Bayesian networks have been extensively studied, many applications remain theoretical and fail to incorporate operational and incident data comprehensively ([3, 5]). This gap between prescriptive regulations and practical reliability outcomes underscores the necessity for further investigation.
Quantitative studies have highlighted the relative contribution of subsystems to overall DP reliability. For example, some research reported that control and thruster subsystems contribute approximately 1-7% of failures, while power related failures contribute 6-10% in DP2 and DP3 configurations [8]. Similarly, a Reliability Availability Maintainability (RAM) study showed that the probability of DP2 system failure during a three months operation can reach 1.52% compared to 0.16% for DP3 systems, with busbars and wind sensors identified as the most critical components [9]. These findings highlight that even in redundant configurations, specific elements of the DP architecture remain vulnerable.
Beyond technical subsystems, human factors play a non-negligible role in DP incidents [10]. An analysis of historical cases revealed that approximately 29.5% of DP incidents are attributable to human error, with a higher correlation observed in drilling and diving operations [11]. Advances in reliability modelling have attempted to capture these aspects; for example, dynamic human reliability assessment frameworks based on Bayesian methods have been proposed to model time dependent performance degradation and environmental influences [12]. Yet, such approaches are still rarely integrated into holistic DP systems analyses.
Another critical failure mode in DP operations is blackout or loss of power. Probabilistic studies using Fault Tree and Bayesian methods demonstrated that blackout risk remains a significant contributor to loss of position (LOP) events, even in highly redundant systems [13]. Complementary to these probabilistic methods, recent efforts have applied data driven techniques such as Long Short Term Memory (LSTM) networks to predict the reliability index of DP subsystems in real time [14]. While these approaches represent promising advances, their integration into regulatory and operational practices remains limited.
Furthermore, most existing reviews address specific components or failure categories such as power management, thruster reliability, or control system robustness without considering the overall system interdependencies and cascading effects that can lead to full DP failure. Human factors, although acknowledged as critical, are often treated qualitatively rather than quantitatively in reliability models. This fragmentation highlights a persistent gap in the literature: the lack of a comprehensive framework that connects failure modes, reliability modelling, and human reliability under a single integrated approach.
Therefore, this paper aims to provide a holistic review of failure modes in Dynamic Positioning operations, bridging the gap between traditional probabilistic methods and emerging AI-driven reliability approaches. The review categorizes the main failure domains power, thruster, control/sensor, and human factors and compares the strengths and limitations of different modelling techniques used in past research. By synthesizing findings from the past decade (2015–2024), this study contributes to a more complete understanding of DP reliability, supports the development of hybrid analytical data driven methodologies, and offers recommendations for improving safety and fault tolerance in future DP vessel designs.
Unlike prior surveys that discuss DP failures independently within technical or operational domains, this review provides a structured synthesis of power, thruster, control/sensor, and human failure mechanisms while introducing a hybrid reliability perspective that integrates traditional probabilistic models with recent machine-learning prognostics. The contribution of this work lies in identifying the cascading interdependence among failure domains and outlining a unified direction for risk-aware DP assurance methods.
2 Materials and methods
This study adopts a systematic literature review methodology to provide an evidence-based synthesis of failure modes in Dynamic Positioning (DP) vessel operations. The research protocol was designed according to PRISMA guidelines to ensure transparency, repeatability, and rigor in article selection.
2.1 Data sources and search strategy
Articles were retrieved from Scopus, IEEE Xplore, Web of Science, and Elsevier ScienceDirect databases. The search was performed for the period 2015–2024 to capture current industry practices and emerging technologies. The search keywords combined technical, human, and predictive elements using Boolean operators:
(“Dynamic Positioning” OR “DP systems”)AND(“failure” OR “incident”)AND(“reliability” OR “risk” OR “FMEA” OR “MTBF” OR “FTA”)
The initial search identified 505 studies, including journal articles and reputable engineering conferences.
2.2 Screening and eligibility criteria
Screening was conducted at title–abstract then full-text level using the following inclusion criteria:
- Peer-reviewed publications
- Focus on DP failure modes, reliability assessment, or AI-based prognostics
- Data-driven or analytical methodology
- Offshore DP2/DP3 operational context
Non-English, non-peer-reviewed reports, and non-DP automation works were excluded. Industry grey literature (IMCA incident reports, MTS guidelines) was excluded from the VOSviewer bibliometric co-occurrence map because structured metadata fields (DOI, indexed keywords) required by VOSviewer are not available for such documents; however, IMCA incident data and MTS guidelines are referenced directly in the body text where relevant. After screening, 139 papers were considered eligible for detailed review.
2.3 Quality assessment
Full-text papers were evaluated using reliability quality rubric covering:
- Analytical rigor
- Availability and credibility of incident/failure data
- Subsystem coverage (power, thruster, control/sensor, human)
- Reproducibility and engineering relevance
Finally, 26 high-quality studies were retained for qualitative synthesis, with 10 core studies selected for in-depth comparative analysis due to their comprehensive failure modelling approaches.
2.4 PRISMA flow
To ensure transparency and reproducibility, the literature selection process was conducted following the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines. The screening procedure involved multiple stages, including database identification, duplicate removal, title and abstract screening, full-text eligibility assessment, and final study inclusion. This systematic approach was adopted to minimize selection bias and ensure that only relevant and high-quality studies related to Dynamic Positioning (DP) reliability and failure analysis were retained for further evaluation. The complete workflow of the article selection process is illustrated in Figure 1.
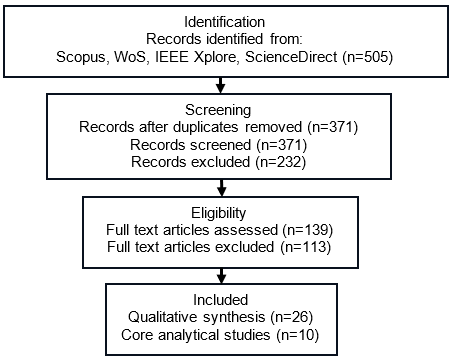 Fig. 1. PRISMA flow
Fig. 1. PRISMA flow
To ensure transparency and reproducibility, the literature selection process was conducted following the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) guidelines. The screening procedure involved multiple stages, including database identification, duplicate removal, title and abstract screening, full-text eligibility assessment, and final study inclusion. This systematic approach was adopted to minimize selection bias and ensure that only relevant and high-quality studies related to Dynamic Positioning (DP) reliability and failure analysis were retained for further evaluation. The complete workflow of the article selection process is illustrated in Figure 1.
2.5 Bibliometric mapping using VOSviewer
Following the PRISMA-based article selection process, a bibliometric analysis was undertaken to explore the thematic composition of the final dataset and to verify its representativeness. Keyword co-occurrence mapping provides an objective means of identifying the most frequently investigated topics and their interconnections within the DP reliability literature. This approach complements the qualitative review by revealing the underlying research structure and highlighting areas of concentration across the selected publications. The resulting network visualization generated using VOSviewer is shown in Figure 2.
A bibliometric co-occurrence analysis was conducted using VOSviewer (v1.6.19) to validate the thematic relevance and representativeness of the selected literature. Metadata obtained from Scopus were analysed using the full-counting method and association-strength normalization, resulting in the keyword co-occurrence network presented in Figure 2. This analysis provides an objective overview of the major research themes and their interrelationships within the Dynamic Positioning (DP) reliability domain.
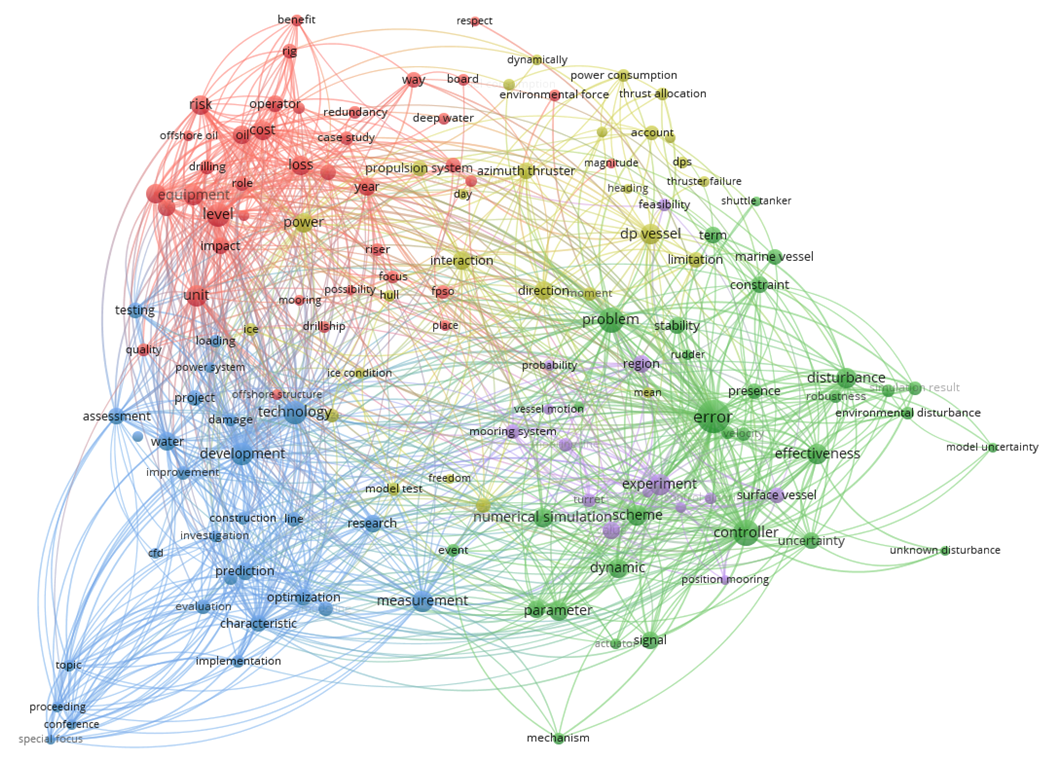
Fig. 2. VOSviewer keyword co-occurrence network based on 139 eligible publications.
The resulting network reveals five primary thematic clusters. The red cluster is associated with power blackout risk and propulsion failures, while the yellow cluster focuses on thruster allocation and station-keeping mechanisms. The green cluster represents sensor errors, environmental disturbances, and control robustness. Emerging topics related to predictive monitoring, optimization, and decision-support technologies are grouped within the blue cluster, whereas the purple cluster encompasses simulation-based validation and experimental modelling approaches. Together, these clusters reflect the multidisciplinary nature of contemporary DP reliability research.
This distribution confirms that the reviewed studies adequately cover the main contributors to DP performance degradation particularly power and thruster related failures as well as emerging analytical approaches in control and data driven safety assurance. Thus, bibliometric validation supports the methodological robustness of the selected article set. This analysis provides objective evidence that the literature selection process did not overlook any critical knowledge domains within DP failure research.
2.6 Data extraction and categorization
Data from the selected studies were systematically extracted and categorized into five principal domains: power and electrical distribution systems, thruster and propulsion units, sensors and control systems, human reliability factors, and AI-driven prognostic analytics. For each study, information related to failure mechanisms, reliability assessment methods, operational contexts, and key findings were compiled and organized within these domains. This structured dataset enabled a consistent comparison across different research approaches and provided the foundation for the subsequent synthesis, failure mode categorization, identification of research trends, and comparative analysis presented in the following sections.
3 Results and discussion
3.1 Background on dynamic positioning system
Dynamic Positioning (DP) is a control technology that enables a ship or floating structure to maintain its position and heading by using its own propulsion and thruster systems, without anchoring or mooring, even under dynamic environmental loads such as wind, waves, and currents [2]. Because DP systems must operate reliably in harsh and variable offshore conditions, their architecture is typically composed of several interlinked subsystems, each with inherent failure risks [8]. Below is an overview of the main components and design principles.
3.1.1 Power generation and distribution system
The DP power system supplies electricity to all thrusters, control computers, sensors, and auxiliary systems. It usually comprises multiple redundant generators, switchboards, busbars, and power management units to ensure fault tolerance[15].
3.1.2 Thruster/ propulsion system
Thrusters (azimuthing, tunnel, retractable, or fixed) provide the forces to counteract environmental loads and maintain station. Their allocation (thrust vectors) is managed by the control system to optimally balance power usage, mechanical constraints, and redundancy [16].
3.1.3 DP control system and control algorithms
The heart of the DP systems is a control computer (or set of computers) which processes sensor inputs, computes control laws, and issues commands to thruster units. Typically control algorithms include PID controllers, state space control, observer-based controllers, and modern adaptive or fault tolerant schemes. Control allocation logic distributes the computed forces to individual thrusters, taking into account mechanical limits, redundancy, and optimization criteria [17].
3.1.4 Sensors and position reference systems
To maintain accurate position and heading control, a Dynamic Positioning (DP) system relies on multiple sensors and position reference inputs that continuously provide navigational and environmental data. These typically include Differential Global Positioning Systems (DGPS), inertial measurement units (IMUs) and gyroscopes, wind sensors (anemometers), motion reference units incorporating accelerometers and gyroscopes, as well as acoustic and hydroacoustic positioning systems such as Ultra-Short Baseline (USBL), Long Baseline (LBL), and Hydroacoustic Position Reference (HPR) systems [18]. To enhance reliability and fault tolerance, DP systems employ redundancy and cross-checking mechanisms among reference sources, thereby reducing the risk of position degradation caused by single-sensor failures.
3.1.5 Redundancy, independence, and safety architecture
Because DP is often safety critical, system design includes redundancy (duplicate or triplicate units), segregated faults zones, failover mechanisms, and error detection logic. Classification societies and guidelines (IMO MSC/ Circ.645, DNV, IMCA, and the Marine Technology Society (MTS) DP Vessel Design Guidelines) impose rules on independent groups, fire integrity, fault tolerance, and proving trials to verify reliability [19], [20].
3.1.6 Operational interfaces and monitoring
The DP systems must interface with vessel control systems, alarm, and monitoring subsystems, operator consoles, and safety systems (e.g. emergency shutdown). The system constantly monitors health status, error flags, and performance margins to detect anomalies and react accordingly [11].
3.1.7 Performance requirements and DP classes
DP systems are categorized into classes (e.g. DP1, DP2, DP3), with increasing levels of redundancy and fault tolerance. For instance, DP2 systems require redundancy such that no single fault causes total failure; DP3 system require further physical separation and fire integrity between redundant groups. Performance metrics for DP include station keeping accuracy, heading control, robustness to environmental disturbances, and recovery from faults. The choice of control strategy and system architecture directly impacts these metrics [18].
3.1.8 Challenges and advances in DP technology
Over the decades, control methods and system designs have evolved to cope with nonlinearity, unmodeled disturbances, actuator saturation, model uncertainty, and sensor faults. Survey of DP control development highlights transitions from fixed gain PID to adaptive, fault tolerant, and predictive control schemes. Recent research focuses on hybrid approaches, observer-based estimation, machine learning, and fault diagnosis integration to improve resilience. Furthermore, hybrid simulation/ experiment testbeds are being developed to validate DP systems more realistically and reduce the gap between simulation and real world performance ([1, 17]).
3.2 Failure modes in DP operation
Failure modes in DP operation can be broadly categorized into technical failures (e.g., thruster malfunctions, sensor inaccuracies, power issues) and human related incidents [5]. A detailed examination of these failure modes is presented below.
3.2.1 Technical failures
Technical failures in DP systems are often attributed to:
- Thruster Failures: Thruster malfunctions are a major cause of losses in DP capability. In some reported incidents, a low percentage of thrusters online has been directly correlated to human errors during drilling operations [11].
- Sensor and Control System Errors: failures in sensors (GNSS, gyros, wind sensors) can lead to incorrect position estimation. A significant proportion of incidents have been related to sensor issues, negatively impacting system performance [21].
- Power and Electrical Failures: Power outages or electrical faults contribute to approximately 15.4% of incidents in some surveys [11].
The table below summarizes the distribution of main causes for DP incidents based on an IMCA report covering 2007-2015, the “Human” category (13%) reflects the IMCA incident classification scheme for the 2007–2015 reporting period and does not represent the total proportion of all human-related contributing factors across other datasets.
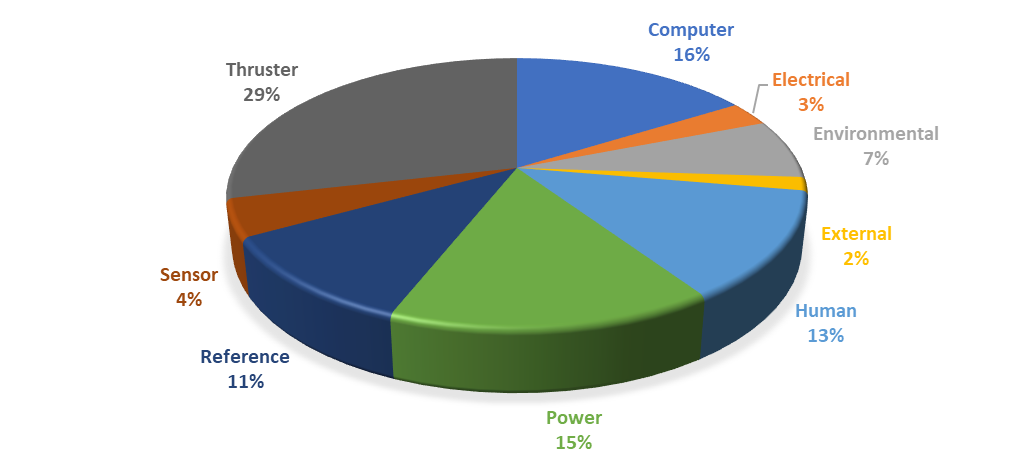
Fig. 3. Reported DP Incident Cause [13]
3.2.2 Human-related failures
Reported percentages of human-related DP incidents vary across studies because different datasets and classification schemes are used. Human error plays a critical role in the failure of the DP operations. In a dataset of 311 incidents, 62 incidents were attributed to human related causes (approximately 20%) [11]. These errors can be further classified into [21]:
- Sensory errors, difficulty in distinguishing system controls and indicators.
- Memory errors, inadvertent omissions such as failing to adjust a critical parameter
- Decision errors, incorrect decisions made under pressure, which account for around 43% of human errors.
- Action errors, incorrect manual activation of system controls, representing approximately 36% of human errors.
The following figure shows the distribution of human factor errors across different error types based on expert analyses.
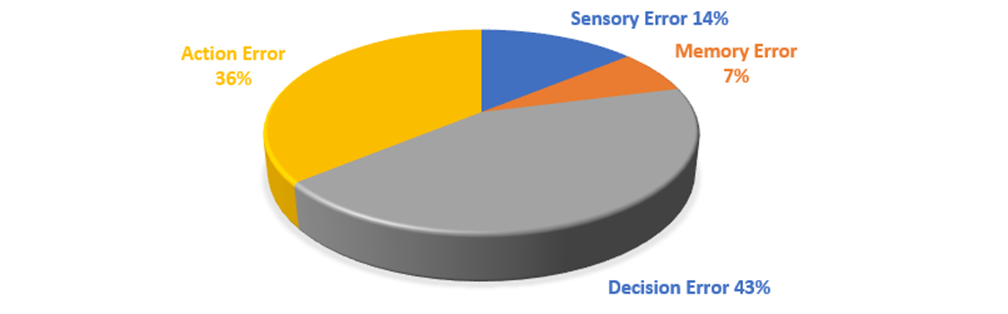
Fig. 4. Adapted from IMCA incident analyses [21]
As illustrated in Figure 4, decision errors constitute the largest proportion of human-related failures, accounting for approximately 43% of reported cases, followed by action errors at 36%. In contrast, sensory and memory errors contribute 14% and 7%, respectively. This distribution suggests that failures in judgment, situational awareness, and decision-making under operational pressure represent the most significant human reliability challenges in DP operations. Such findings are particularly relevant during high-risk activities, including drilling, diving support, and subsea construction, where operators are required to respond rapidly to changing environmental conditions and system status information. Furthermore, incident investigations frequently reveal that technical malfunctions and human actions are not independent events; rather, technical anomalies often increase operator workload and cognitive demands, thereby elevating the likelihood of incorrect decisions or inappropriate responses. Consequently, improving DP safety requires not only enhancements in system reliability and redundancy but also the development of effective decision-support systems, operator training programs, and human-centered interface designs to mitigate human-related risks.
3.3 Reliability assessment approach in DP systems
Traditionally reliability assessment methods in DP operations have relied on probabilistic and statistical analysis, including failure mode and effect analysis (FMEA), fault tree analysis (FTA), Bayesian network, and regression modelling. These methods form the foundation for understanding the likelihood of failure events and their interdependencies [3].
3.3.1 Quantitative reliability formulation
To provide a more rigorous reliability assessment of the Dynamic Positioning (DP) system, we adopt a quantitative reliability modelling approach, drawing upon industry-peer reviewed data for component failure rates. As implemented in Vedachalam & Ramadass (2017), the reliability $R(t)$ of a single component (e.g. thruster, electric subsystem) under a constant failure rate $\lambda$ is given by the exponential reliability function:
Accordingly, the Mean Time Between Failures (MTBF) is defined as:
This formulation allows us to estimate the probability that a given component will remain operational after time $t$. According to their analysis, DP-class configurations with redundancy may achieve multi-year MTBF values depending on subsystem reliability and redundancy architecture [22].
3.3.2 System-level reliability considering redundancy
Recognizing that many DP systems (DP2, DP3) include redundant components to avoid single-point failures, system-level reliability must account for series and parallel compositions of subsystems. For instance, for two identical redundant components arranged in parallel, the system reliability $R_{\mathrm{sys}}(t)$ becomes:
where $R_A(t)$ and $R_B(t)$ are the reliabilities of each redundant component. This approach follows standard reliability block-diagram reasoning as applied in maritime DP reliability studies. By modelling each DP subsystem (thrusters, power supply, control/sensor bank, etc.) and their redundancies, an overall system reliability profile over operational time can be constructed, enabling comparison between alternative DP configurations (e.g. DP2 vs DP3) in terms of expected uptime or risk of loss-of-position (LOP) [8].
3.3.3 Probabilistic and statistical techniques
- Failure Mode and Effect Analysis (FMEA): Utilized to systematically identify potential failures in DP subsystems and estimate their impacts [5].
- Fault Tree Analysis: helps in visualizing the relationship between primary failures (e.g., thruster or sensor failures) and systemic consequences, such as loss of positioning[21].
- Bayesian Network Approaches: Used to incorporate uncertainty and human factors in DP incident analysis, though they may suffer from subjective bias in probability assessments. Methodological advances in managing uncertainty through Fuzzy Fault Tree Analysis (FFTA) and Pareto-based risk prioritization, as demonstrated in recent engineering reliability studies [23], provide a useful parallel framework applicable to DP reliability assessments involving incomplete or uncertain incident data. Such approaches are particularly relevant for DP operations where human factors, environmental disturbances, and subsystem interactions introduce uncertainty into probabilistic risk estimation [21].
- Regression Modelling: Logistic regression models have been applied to predict human related DP incidents based on independent variables such as the percentage of thrusters online, water depth, and weather conditions[11].
3.3.4 Reliability metrics
Parameters such as mean time between failures (MTBF), probability of failure on demand (PFD), and risk indices are central to DP reliability studies. One study noted that while technical failures are predictable through traditional methods, the impact of human factors remain less quantifiable, thus necessitating the integration of qualitative judgements with statistical data[11], [21].
3.3.5 Illustration case
For illustration, assuming a thruster failure rate of $\lambda = 2 \times 10^{-5} \, \mathrm{h}^{-1}$ , the MTBF is:
For a DP2 parallel configuration:
For a 24-hour mission:
meaning a probability of thruster-related loss of availability ≈0.096% per mission. Such risk sensitivity analyses support operational readiness decisions.
3.4 Data-driven and AI-based prediction methods
With the advent of big data analytics and machine learning, data driven approaches have begun to supplement or even replace traditional reliability methods. This section highlights recent trends in applying AI to predict and prevent DP systems failures [24].
3.4.1 AI driven predictive maintenance
Recent research shows that leveraging both structured and unstructured data can enhance predictive maintenance for critical marine components. For example, one study demonstrated the use of machine learning techniques to analyse terabytes of unstructured data from drilling rigs. This approach enabled the anticipation of potential failures in subsea blowout preventers (BOPs) by identifying abnormal patterns in sensor and event logs[25].
3.4.2 Data driven & dynamic positioning reliability Index (DP-RI) approach
As an advanced alternative to static reliability calculations, the concept of a system-level reliability index for DP the DP-RI has been proposed. DP-RI aggregates reliabilities of all relevant subsystems (power, thruster, sensors, control, etc.) into a single composite metric:
where each $R_i(t)$ corresponds to the reliability of a subsystem. In its original conception, DP-RI was derived using historical reliability data from vendor databases, accident databases, and prior FMEA/HIL test results [3]. More recently, a hybrid methodology has been developed combining the mathematical reliability formulation with a data-driven predictive model (e.g. using a Long Short-Term Memory network, LSTM). This enables near-real-time prediction of subsystem reliability under varying operational and environmental conditions [14].
3.4.3 Neural network and deep learning
Neural network control schemes have been implemented to adaptively predict system behaviours under varying conditions. Robust adaptive neural network control systems have been shown to maintain prescribed performance even in the presence of model uncertainties and input saturation[26]. These systems rely on layered representations that capture complex nonlinear dynamics inherent in DP operations. This modelling philosophy aligns with cross-industry research on the reliability and survivability of onboard autonomous control systems, where structural-functional reliability, system reconfiguration trajectories, and survivability under multi-mode operations were modelled using probabilistic and logical approaches. These concepts are relevant to DP systems because modern DP architectures similarly depend on redundant control configurations, fault-tolerant logic, and operational mode transitions under uncertain environmental conditions [27].
3.4.4 Data analytics for failure prediction
Data analytics platforms are now being used to integrate real time monitoring and historical data or predict failures before they occur. Ocyan, a drilling contractor, collaborated with an AI start up to develop dashboards that track operational parameters, such as cycle counting and pump activation intervals, for BOPs. The predictive maintenance strategy leverages text mining techniques to extract critical information from non-structured logs, providing actionable insights to optimize maintenance windows and reduce downtime[25].
Table 1 highlights the fundamental differences between traditional reliability assessment methods and emerging AI-driven approaches in DP operations. Traditional techniques, including FMEA, FTA, and regression-based models, primarily rely on structured incident data and historical failure records to estimate risk and system reliability. These methods are generally transparent, computationally efficient, and well-established within existing regulatory and engineering frameworks. In contrast, AI-driven methods can process both structured and unstructured datasets, enabling the extraction of insights from sensor streams, operational logs, and real-time monitoring systems. Their ability to continuously learn from new data enhances predictive accuracy and adaptability under changing operational conditions. However, these advantages come at the cost of increased computational complexity, greater data quality requirements, and challenges related to model validation and interpretability. Consequently, rather than replacing conventional reliability techniques, AI-based methods are increasingly viewed as complementary tools that can enhance predictive maintenance, operational awareness, and risk-informed decision making in DP systems.
Table 1. Adapted from comparative analyses in recent DP reliability studies [11, 21]
|
Aspect |
Traditional methods |
AI driven methods |
|
Data type |
Structured incident reports |
Structured + unstructured (sensor & log data) |
|
Analysis technique |
FMEA, FTA, regression modelling |
Machine learning, deep learning, neural networks |
|
Human factor integration |
Limited, qualitative assessments |
Data driven, models incorporating behaviour patterns |
|
Predictive accuracy |
Based on historical failure rates |
Adaptive prediction with real time data |
|
Adaptability |
Low adaptability to changing conditions |
High adaptability and self-learning capabilities |
|
Computational requirements |
Relatively low computational needs |
High requires robust data processing frameworks. |
3.4.5 Emerging AI applications
Emerging work on AI applications in DP operations is increasingly addressing the integration of human factors with technical monitoring. Deep learning models are being trained to distinguish between system noise and genuine classical probabilistic techniques with AI algorithms are being developed to improve decision support in high stakes operational environments[17].
3.5 Comparative findings
Several studies have highlighted both similarities and discrepancies in failure modes, human factor contributions, and subsystem vulnerabilities in DP operations. The following points summarize the findings from key research efforts:
- Human Factors: research indicates that human related incidents account for approximately 20% of DP failures, with decision and action errors being predominant[11, 21]. In operations such as drilling, a reduced percentage of thrusters online significantly correlates with increased human errors.
- Technical Components: Thruster failures, ranked at 28.6% in some incident reports, stand out as the most critical technical vulnerabilities. Sensor and power related failures also contribute substantially to overall system risk[11].
- Reliability Metrics: Traditional probabilistic models provide robust failure estimates for technical components but are less effective in quantifying human errors, prompting the need for data driven methods and neural network models.
- AI and Data Analytics: AI driven predictive maintenance has shown promise in reducing unscheduled downtimes. For instance, data analytics dashboards developed for BOP components have achieved higher maintenance planning accuracy compared to time based approaches[25].
- Integrated Approaches: Combining traditional reliability estimates with AI based predictions yields a more comprehensive view of operational risk, facilitating proactive interventions and improved safety management[17].
- Interdependency of DP Failure Domains: Although failures are commonly categorized into separate domains, operational evidence indicates that technical and human failures can propagate in a cascading manner, ultimately leading to a loss-of-position (LOP). A blackout caused by a power switching anomaly may result in thruster drop-out, which increases the control workload and therefore elevates the likelihood of operator misjudgement. This interdependency demonstrates that DP failures are rarely isolated events, and a system-level perspective is essential for realistic reliability assessment.
Figure 5 illustrates the proposed hybrid reliability assurance framework, which integrates traditional reliability assessment methods with modern AI-driven analytics to support risk-informed decision making in Dynamic Positioning (DP) operations. On one side, conventional approaches such as Failure Modes and Effects Analysis (FMEA) and Fault Tree Analysis (FTA) provide a structured understanding of technical failure mechanisms and subsystem vulnerabilities. On the other side, machine learning and predictive analytics enable real-time condition monitoring, predictive maintenance, and human-factor modelling based on operational data. These complementary inputs are combined through an integrated risk assessment process, while Human-in-the-Loop supervision ensures that operator expertise and contextual judgment remain central to decision making. The framework highlights that effective DP risk management requires not only reliable equipment and predictive technologies but also continuous interaction between automated decision-support systems and human operators. Such integration facilitates proactive intervention strategies aimed at reducing loss-of-position events, enhancing operational resilience, and improving overall safety performance in offshore operations.
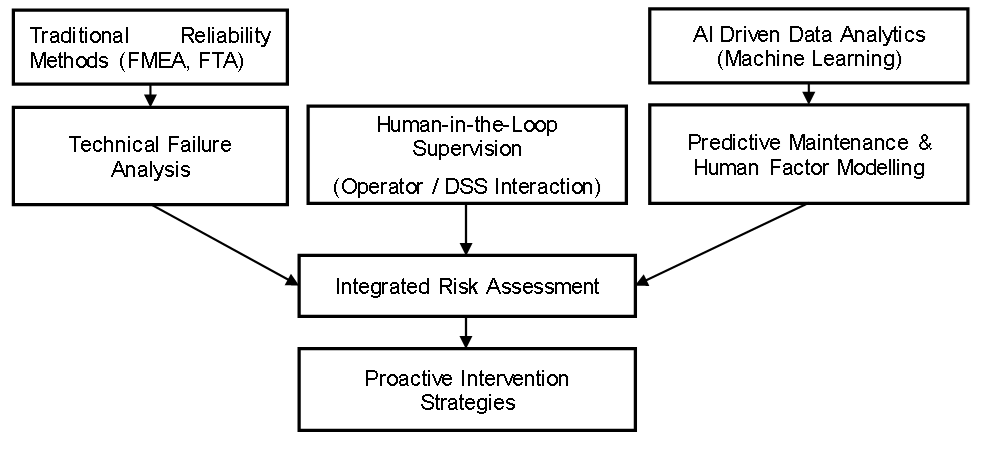
Fig. 5. Diagram illustrates the synthesis of traditional and AI approaches for a comprehensive risk [17, 21]
3.6 Research gaps
Although substantial progress has been achieved in understanding DP failure mechanisms and developing reliability assessment methodologies, several unresolved challenges remain. The literature demonstrates continuous advances in probabilistic modelling, reliability engineering, human reliability assessment, and AI-driven prognostic techniques. However, these developments are often fragmented across specific subsystems or operational contexts, limiting their ability to provide a holistic representation of DP system performance. A critical review of the selected studies reveals a number of persistent gaps related to technical reliability, human factors, real-time risk prediction, and the practical implementation of advanced analytical methods. The major research gaps identified from the literature are summarized in Table 2.
Table 2. Research gaps
|
Reliability domain |
Dominant failures |
Best modelling technique |
Still missing |
|
Power system |
Blackout, bus-tie failure |
FTA + RAM |
Real-time predictive fallback |
|
Thrusters |
Mechanical faults |
MTBF + allocation based reliability |
Operator-induced recovery failures |
|
Sensors |
GNSS/gyro dropouts |
Bayesian filtering |
Multi-sensor fusion reliability |
|
Human |
Decision/action errors |
Bayesian HRA |
Cognitive load quantification |
|
AI-driven |
Residual degradation |
LSTM/NN analytics |
Verification in DP trials |
Despite significant advances in both traditional reliability assessment and AI-based predictive techniques, several important research gaps remain. As summarized in Table 2, current studies tend to focus on individual failure domains rather than adopting a comprehensive system-level perspective. While established methods such as FTA, RAM analysis, Bayesian filtering, and Human Reliability Assessment (HRA) provide valuable insights into specific failure mechanisms, they often lack the capability to incorporate real-time operational conditions, interdependencies among subsystems, and dynamic human factors. Similarly, AI-driven approaches have demonstrated promising predictive capabilities, particularly in anomaly detection and degradation forecasting, but their practical validation in real DP operations remains limited. Furthermore, challenges such as cognitive load quantification, multi-sensor reliability assessment, operator-induced recovery failures, and real-time predictive fallback mechanisms have yet to be adequately addressed. These limitations highlight the need for integrated reliability frameworks that combine traditional engineering reliability models, human reliability analysis, and data-driven predictive technologies to improve the safety, resilience, and operational performance of DP vessels.
3.6.1 Integration challenges
One prominent challenge is the integration of qualitative human factors with quantitative reliability models. Although cognitive errors have been categorized into sensory, memory, decision, and action errors, the dynamic interplay among these factors in real operational environments remains underexplored. Future studies should aim to develop integrated models that simultaneously consider technical parameters and human reliability indices. Furthermore, a critical and often overlooked gap concerns the modelling of Common Mode Failures (CMF) in redundant DP architectures. In DP2 and DP3 systems, the failure of a shared component — such as a bus-tie breaker or a common sensor network — can simultaneously disable multiple redundant channels, bypassing the intended fault isolation. Unlike independent random failures, CMFs violate the independence assumptions underlying standard parallel-redundancy reliability calculations. Future research should incorporate beta-factor models or explicit CMF fault-tree branches to quantify the probability that a single shared-component failure leads to system-level loss-of-position, particularly during bus-tie operations in DP3 vessels.
3.6.2 Data quality and availability
The success of AI driven approaches depends heavily on the quality and availability of data. Many studies indicate that even though modern rigs generate terabytes of data daily, only a small fraction (5-10%) is analysed for predictive maintenance purposes. Data contamination and insufficient data volumes can lead to overfitting and poor model generalizability. A concerted effort is required to standardize data collection protocols and improve sensor calibration to ensure robust model performance.
3.6.3 Stratification of DP operations
DP operations vary significantly with respect to the type of operation (e.g., drilling, ROV operations, cable laying). The configuration of the DP systems and the associated environmental constrains differ across these applications, suggesting that a one size fits all reliability model may not be appropriate. Stratified modelling approaches that consider operational context would lead to better predictive accuracy.
3.6.4 Computational complexity and real time performance
Implementing adaptive neural network algorithms and other AI methods in real time operational environments presents computational challenges. Methods that balance real time performance with computational complexity are needed, especially for systems operating in harsh maritime conditions.
3.6.5 Continued need for human in the loop systems
While automation and AI hold tremendous promise, the critical role of human expertise remains undeniable. Future research should focus on developing hybrid models that combine data driven insights with human decision-making capabilities. Enhancing the usability and interpretability of AI systems for DP operators is essential for bridging the gap between automated predictions and actionable insights. In the proposed hybrid framework (Figure 5), the Human-in-the-Loop component is positioned as an independent supervisory input that operates across all stages of the framework but is most critically engaged at the “Proactive Intervention” stage. Specifically, Decision Support Systems (DSS) which aggregate AI-generated risk predictions and RAM-derived reliability scores — are designed to present operators with contextualised alerts and recommended actions rather than autonomous commands. This design directly addresses the dominant human error category of “Decision Errors” (43% of human-related incidents [21]), by reducing cognitive load and time pressure during high-risk manoeuvres. The DSS does not replace operator judgment but structures the decision environment so that the operator is guided toward high-reliability choices, particularly during power system anomalies or thruster degradation that may otherwise lead to loss-of-position events.
3.6.6 Limitations of current AI-driven reliability approaches
While data-driven approaches have demonstrated improved early failure detection, their practical implementation remains constrained by limited access to structured operational datasets, sensitivity to sensor noise, and lack of interpretability for DP operators. Without standardized data reporting, cyber-physical security assurance, and model verification protocols, AI-based reliability tools cannot yet replace classical deterministic techniques but should instead complement them within a hybrid assurance framework.
3.6.7 Proposed hybrid reliability assurance framework
Based on the findings from this review, a hybrid reliability assurance framework is proposed integrating:
- deterministic reliability modelling for critical equipment and redundancy logic,
- context-dependent human reliability quantification, and
- data-driven prognostics for real-time anomaly detection. Such integration provides a structured pathway toward reducing loss-of-position probability and enhancing operational resilience in DP-enabled offshore missions.
4 Conclusions
The outcome of this review highlights the lack of system-level methodologies that simultaneously capture component degradation, operational stressors, and human decision pathways contributing to loss-of-position (LOP). To address this, we propose a unified framework aligning exponential reliability laws and redundancy logic with Bayesian human-reliability updating and LSTM-based predictive diagnostics as a foundation for real-time DP resilience evaluation.
The holistic review has analysed failure modes in dynamic positioning vessel operations with an emphasis on both technical and human factors. The key findings include:
- Integrated Failure Causes: DP failures are a result of both technical malfunctions (thruster, sensor, and power failures) and human errors (sensory, memory, decision, and action errors). Human factors account for approximately 20% of DP events emphasizing the need for reliable human machine interface designs.
- Critical Component Vulnerabilities: Thrusters remain the most vulnerable subsystem, contributing to 28.6% of incidents. Sensor and power failures also pose significant risks.
- Advances in Predictive Maintenance: AI and machine learning techniques are being effectively applied to predict failures from both structured and unstructured data. These data driven methods, when integrated with traditional reliability assessments, provide a comprehensive risk profile for DP operations.
- Challenges and Future Directions: Key research gap include the integration of human factors with technical models, ensuring data quality, stratifying models according to specific DP operations, and overcoming computational hurdles for real time applications.
In conclusion, the fusion of probabilistic reliability approaches with modern AI based analysis offers a promising path toward improved safety and operational efficiency in dynamic positioning vessel operations. The combination of traditional methodologies with advanced data analytics can enable proactive maintenance and risk management, leading to safer and more robust offshore operations.
Acknowledgements
The authors would like to express their sincere gratitude to Institut Teknologi Sepuluh Nopember (ITS), Surabaya, Indonesia, for its support and assistance in facilitating the publication of this research.
References
- Mehrzadi, M., Terriche, Y., Su, C.-L., Bin Othman, M., Vasquez, J. C., & Guerrero, J. M. (2020). Review of dynamic positioning control in maritime microgrid systems. Energies, 13(12), 3188. https://doi.org/10.3390/en13123188
- Kvaal, S., Østby, P., & Breivik, M. (2022). DP and the art of perfect positioning [White paper]. Kongsberg Maritime.
- Fernandez, C., Kumar, S. B., Woo, W. L., Norman, R., & Dev, A. K. (2018). Dynamic positioning reliability index (DP-RI) and offline forecasting of DP-RI during complex marine operations. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering (Vol. 51203, p. V001T01A061). ASME.
- Dong, Y., Rokseth, B., Vinnem, J. E., & Utne, I. B. (2017). Analysis of dynamic positioning system accidents and incidents with emphasis on root causes and barrier failures. In Risk, reliability and safety: Innovating theory and practice (p. 29). CRC Press.
- Wang, F., Zhao, L., & Bai, Y. (2024). Survey on reliability analysis of dynamic positioning systems. Ships and Offshore Structures, 19(8), 999–1009. https://doi.org/10.1080/17445302.2023.2241641
- Dong, Y., Vinnem, J. E., & Utne, I. B. (2017). Improving safety of DP operations: Learning from accidents and incidents during offshore loading operations. EURO Journal on Decision Processes, 5(1–4), 5–40.
- Olubitan, O., Loughney, S., Wang, J., & Bell, R. (2018). An investigation and statistical analysis into the incidents and failures associated with dynamic positioning systems. In Safety and reliability – Safe societies in a changing world (pp. 79–85). CRC Press.
- Clavijo, M. V., Martins, M. R., & Schleder, A. M. (2018). Reliability analysis of dynamic positioning systems. In Progress in maritime technology and engineering (pp. 265–272). CRC Press.
- Clavijo, M. V., Schleder, A. M., Droguett, E. L., & Martins, M. R. (2022). RAM analysis of dynamic positioning system: An approach taking into account uncertainties and criticality equipment ratings. Proceedings of the Institution of Mechanical Engineers, Part O: Journal of Risk and Reliability, 236(6), 1104–1134.
- Varela, Z. S., Boullosa-Falces, D., Boko, Z., & Skoko, I. (2022). Human error analysis in dynamic positioning incidents according to the nature of the operations in progress. Paper presented at the Maritime Transport Conference (MTC 2022), Barcelona, Spain.
- Sanchez-Varela, Z., Boullosa-Falces, D., Skoko, I., & Boko, Z. (2024). Analysis of human-related incidents during dynamic positioning operations. Journal of Marine Science and Engineering, 12(6), 907.
- Huang, X., & Chen, J. (2015). Time-dependent reliability model of deteriorating structures based on stochastic processes and Bayesian inference methods. Journal of Engineering Mechanics, 141(3), 04014123.
- Sanchez-Varela, Z., Boullosa-Falces, D., Larrabe-Barrena, J. L., & Gomez-Solaeche, M. A. (2021). Risk analysis of DP incidents during drilling operations. Transactions on Maritime Science, 10(1), 84–100.
- Fernandez, C., Kumar, S. B., Woo, W. L., Norman, R., & Dev, A. K. (2020). Real-time prediction of reliability of dynamic positioning sub-systems for computation of dynamic positioning reliability index (DP-RI) using long short-term memory (LSTM). In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering. ASME.
- Settemsdal, S., & Radan, D. (2012). DP3 class power system solution for dynamically positioned vessels. Paper presented at the Dynamic Positioning Conference, Houston, TX.
- Tuo, Y., Lin, J., Peng, Z., Wang, Y., & Wang, S. (2025). An energy-efficient thrust allocation based on the improved dung beetle optimizer for the dynamic positioning system of vessels. Journal of Marine Science and Engineering, 13(6), 1041.
- Gao, X., & Li, T. (2024). Dynamic positioning control for marine crafts: A survey and recent advances. Journal of Marine Science and Engineering, 12(3), 362. https://doi.org/10.3390/jmse12030362
- Karkori, F. (2024). Dynamic positioning systems: Class guidance for DP operators (Vol. 21). Springer Nature.
- Chae, C.-J. (2025). The evolution of maritime technology development: A dynamic positioning system perspective of maritime autonomous surface ships. WMU Journal of Maritime Affairs, 24(1), 99–127.
- Marine Technology Society (MTS) Dynamic Positioning Committee. (2021). DP vessel design philosophy guidelines (Rev. 2-Apr ed.). https://dynamic-positioning.com/files_mailing/MTS%20DP%20VESSEL%20DESIGN%20PHILOSOPHY%20GUIDELINES%20(Rev2%20-%20Apr21).pdf
- Snyder, J. (n.d.). Data on DP incidents suggests industry ‘becoming less safe’. Riviera Maritime Media. https://www.rivieramm.com/news-content-hub/news-content-hub/data-on-dp-incidents-suggests-industry-becoming-less-safe-72987
- Vedachalam, N., & Ramadass, G. A. (2017). Reliability assessment of multi-megawatt capacity offshore dynamic positioning systems. Applied Ocean Research, 63, 251–261. https://doi.org/10.1016/j.apor.2017.02.001
- Javanmardi, A., & Ghobad, M. (2025). Research of critical causes of solar panel aging based on fuzzy fault tree and Pareto chart approach. Journal of Applied Engineering Science, 23(2). https://doi.org/10.5937/jaes0-56142
- Simion, D., Postolache, F., Fleacă, B., & Fleacă, E. (2024). AI-driven predictive maintenance in modern maritime transport—Enhancing operational efficiency and reliability. Applied Sciences, 14(20), 9439.
- Albuquerque, C. X. A., Lima, S., Carvalho, G., Leite, F., & Machado, R. (n.d.). Data analytics, artificial intelligence facilitate development of failure prediction models for subsea BOPs. Drilling Contractor. https://drillingcontractor.org/data-analytics-artificial-intelligence-facilitate-development-of-failure-prediction-models-for-subsea-bops-57655
- Li, J., Xiang, X., & Yang, S. (2022). Robust adaptive neural network control for dynamic positioning of marine vessels with prescribed performance under model uncertainties and input saturation. Neurocomputing, 484, 1–12.
- Pavlov, A. N., Pavlov, D. A., Kulakov, A. Y., & Zakharov, V. V. (2024). Study of technology for the reliability and survivability modelling of onboard control system of small spacecraft operating in complex modes. Journal of Applied Engineering Science, 22(3), 612–620. https://doi.org/10.5937/jaes0-50149
Conflict of Interest Statement
The author declares that there is no conflict of interest regarding the publication of this paper. The research was conducted independently, without any commercial or financial relationships that could be construed as a potential conflict of interest.
Author Contributions
Data Availability Statement
The data supporting the findings of this study are derived from publicly available literature sources, including peer-reviewed journal articles, conference proceedings, and industry reports cited in the reference list. No proprietary or confidential data was used. Bibliometric data were obtained from indexed databases and can be reproduced using the search criteria described in the methodology section.
Supplementary Materials
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.