Volume 24 article 1327 pages: 203-212
Received: Oct 13, 2024 Accepted: Mar 20, 2026 Available Online: Apr 15, 2026 Published: Apr 30, 2026
DOI: 10.5937/jaes0-54093
CALCULATION OF NONLINEAR VIBRATION ISOLATION SYSTEMS UNDER HARMONIC ACTION
Abstract
The aim of the study is to develop a methodology for calculating the dynamic characteristics of nonlinear vibration isolators and to evaluate the influence of the type of dissipative forces on the vibration protection efficiency. The paper addresses the calculation of vibration isolators with nonlinear elastic and dissipative properties under harmonic force and kinematic excitations. Using the harmonic linearization method, general expressions were derived for the amplitude-frequency response and the vibration isolation efficiency coefficient. The analysis of these expressions determined the conditions for suppressing large-amplitude vibrations.
Specific analytical relationships were obtained for vibration isolators possessing the most common nonlinear elastic characteristics. These include isolators with odd cubic stiffness characteristics, preloaded systems, systems with symmetric linear elastic stops, and systems with a nonlinear elastic element and symmetric rigid stops.
It was established that the efficiency of vibration protection systems depends significantly on the type of dissipative forces present in the isolator. Analytical relationships were derived, and the performance of vibration isolators with viscous, dry, and internal friction was analyzed. A comparison of the performance efficiency of vibration isolators with different dissipative characteristics was conducted. The possibility of achieving vibration protection goals by combining different forms of damping is highlighted.
Highlights
- General analytical expressions for nonlinear isolator efficiency are derived via harmonic linearization.
- New analytical criteria (limit curves) are obtained to predict amplitude jumps and instability zones.
- Explicit calculation models for isolators with preload, cubic stiffness, and rigid stops are presented.
- Comparative analysis reveals the superior efficiency of internal friction over viscous and dry damping.
Keywords
Content
1 Introduction
Creating high-speed machines and vehicles, boosted by capacity, load and other performance characteristics inevitably leads to increase in intensity, expanding the range of vibration and vibroacoustic fields [1]. Harmful vibrations affect the designer-planned motion laws of machines, mechanisms and control systems, generates workflow instability and can cause failure and a complete mistune of the entire system [1]. Creating effective means of vibration and shock protection is one of the important issues in the design of technological machines and vehicles.
The development of the vibration protection theory began with solving problems of vibration isolation equipment in the linear setting. The fundamental principles of this theory, allowing based on the theory of linear vibrations characteristics of an object to associate with the vibration parameters of vibration-proof system can be found in [1], [2]. Often a vibration system is affected by single or repeated shock pulses. The short duration of shock processes, unsteady vibrations call for direct integration of the motion equations with the initial conditions. Ex-tensive material on the results of linear systems calculation of vibration protection in the form of tables and graphs to determine the amplitude-frequency responses and transfer functions for different types of impulse and shock loads can be found in [3, 4].
In many practically important cases, the disturbing effects are random. These are the loads on vehicles: cars, ships, aircrafts. This led to the need to apply statistical methods to problems of vibration protection [5]. On the problems of vibration protection of equipment, whole departments of institutes worked. The results of the joint work of Soviet and Czechoslovakian scientists, dedicated to the scientific principles, calculation methods, dynamic properties identification and optimal synthesis of linear passive and active vibration isolation systems with specific technical applications, were published in [1].
The design and operation experience of real vibration isolation systems shows the limitations of a well-developed theory of linear vibration protection [6, 7]. Vibration-isolated systems may have several phenomena, an adequate description and study of which is possible only through nonlinear dynamic models. The appearance of non-linear effects, often leading to the deterioration of vibration protection, is due to the increased vibration and shock intensity and non-linear elastic-dissipative characteristics of vibration isolators. On the other hand, the use of vibration isolators with nonlinear characteristics in some cases may be useful. Fundamentals of the theory of nonlinear vibration protection are presented in [6] and were developed in the paper [7].
There are many monographs and journal articles dedicated to designing vibration isolation systems for specific types of machinery and equipment. The number of publications in scientific journals on this subject is not reduced to this day. This is due to a different target setting (one-, two- and three-dimensional) with different kinds of kinematic and force action (harmonic, polyharmonic, pulse, shock, random), with the features of object vibration protection, with the vibration isolators type difference (active, passive), with the difference types of damping elements (rubber steel, hydraulic, pneumatic) etc. They are devoted to various aspects of calculation and design of vibration isolation systems. For instance, references [8, 9, 10, 11] deal with the active vibration isolation systems and references [12, 13, 14] study systems with two or more [15] degrees of freedom. In order to enhance efficiency, some vibration protection systems have vibration isolators of quasi-zero [16, 17] or sometimes even negative stiff-ness [18, 19]. An overview of recent developments and research of nonlinear vibration isolators with negative stiffness is given in article [20]. Some investigations are devoted to protection against shock [21, 22, 23] focus on the possibility of polyharmonic shock. References [24, 25] are devoted to the optimization of the specific vibration protection system parameters, while [26] the influence of nonlinear damping on the quality of vibration protection is considered. In the analyzed works, the harmonic balance method is mainly used to calculate nonlinear vibration protection systems, and in [27] the solution was obtained through generalized coordinates using the matrix of transition functions. There are works devoted to the development of new designs of vibration isolators [28, 29, 30].
Analysis of the problem study shows that the literature pays little attention to the analysis of operation of vibration isolation systems with specific nonlinear characteristics based on the modern theory of nonlinear vibrations. This paper focuses on the calculation and design of vibration isolators with nonlinear elastic characteristics. External impacts are harmonic. However, they may be of both power and kinematic nature.
2 Materials and methods
2.1 Dynamic model
To analyze a vibration-isolated object, we create its dynamic model. The object can be represented as lumped mass with one degree of freedom connected to the base through the vibration isolator. It is modeled as a massless deformable element that has nonlinear elastic and dissipative properties. External actions in a form of harmonic force have an influence on the object or cause harmonic vibrations of object’s base. Based on this dynamic model, we develop a mathematical model of vibration-isolated movement of the object according to d'Alembert’s law.
The vibrations’ equation of vibration-isolated object of mass at harmonic action can be introduced by the following form:
where \( R(x, \dot{x}) \) is the force in a vibration isolator;
\( f_0(\omega) = \frac{F(\omega)}{m} \) at power actions;
\( f_0(\omega) = \xi_0 \omega^2 \) at a kinematic action.
At the kinetic forcing must be understood as the relative motion of an object. The elastic-dissipative characteristics of vibration isolator are usually represented as the sum of elastic and dissipative forces and linearized as a mean motion value:
\( R_y(x) = R_0 + c_g (x - a_0), \quad R_g(x,\dot{x}) = b_g \dot{x} \)
where the linearization coefficients depend on the parameters of the vibration process and are determined at the harmonic action by known formulas [6, 30].
Then the linearized equation of object motion is brought to the form of:
where is the free nonlinear vibration frequency.
The solution to the nonlinear equations of motion according to the harmonic balance method is:
\( x = a_0 + x_0 = a_0 + a \cos(\omega t + \varphi) \)
where а0 is the steady component of motion.
Substituting this solution into the equation of motion, we have R0 = 0. For the average value of elastic force, we then obtain the following expression:
Now we can express as a function of and substitute it into the linearization coefficient formula, so we get the equation of a backbone curve:
The dissipative forces linearization coefficient bg is:
Specific expressions for the vibration amplitude and frequency depend on the actual elastic-dissipative characteristics of the applied isolator.
2.2 Deducing the main calculation functional connections at viscous frictions
In such isolators the dissipative force depends only on speed, i.e. the value of the coefficient bg. Then, using the method of harmonic balance in equation (2) we find that the vibration amplitude is:
where is the vibration damping coefficient.
After solving equations (4) and (5), we can determine the vibration amplitude. By substituting the amplitude into (4), we can find the frequency of nonlinear vibrations.
The backbone curve equation depends on the specific form of the elastic characteristics of the isolator. If it is described as an odd function, then based on (3) we always get a0 = 0.
The effectiveness of vibration isolation system can be estimated with vibration isolation coefficient. In the present case it is determined by a formula determined for a linear system based on the functional connection of frequency to amplitude:
where $\nu(a) = \frac{\lambda(a)}{\lambda_0}$, $n = \frac{\varepsilon}{\lambda_0}$, $z = \frac{\omega}{\lambda_0}$, $\lambda_0 = \sqrt{\frac{c}{m}}$; are the linear vibration frequency.
Vibration protection efficiency condition is . Starting from (7) it reduces to:
Nonlinear systems allow applying various modes with different amplitudes and phases. The realization of these modes depends on the initial conditions, which in practice are not specific and depend on many random factors. Therefore, in designing vibration isolation systems one has to consider the possibility of occurrence of any of these modes.
Extreme values of the amplitudes are achieved at the intersections of backbone curves and amplitude-frequency characteristics (AFC) called resonance curves (Fig. 1). At these points and from (6) we obtain the equation of a limit curve:
\( a_* = \frac{f_0(\omega)}{2\varepsilon \omega} \)
In the intersection points and backbone limiting curves (A and C) the resonance curve is tangent to the limit one, while in all other points it is below this curve. It can be shown that the amplitude extreme values are achieved at the intersection points of the backbone and limit curve. Thus, the intersection point of these curves determines the number of branches and the shape of resonance curves.
Most vibration isolators typically have a ‘stiff’ backbone curve. If the function , then limit curve is a hyperbole and intersects with the “stiff” backbone curve only at one point, A (Fig. 1) and the AFC has only one branch, . Since vibration protection efficiency area corresponds to fluctuations, the efficiency condition will then match the modes.
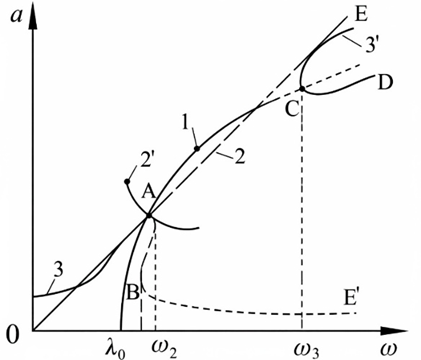
Fig. 1. Backbone curve (1), Limit curve ( ) and AFC ( ) of a nonlinear vibration isolator
If \( f_0 = \xi_0 \omega^2 \), then limiting curve transforms into a straight line which may intersect the ‘stiff’ backbone curve at multiple points (points A and C in Fig. 1). In this case, a characteristic feature of the resonance curves is the appearance of additional branches corresponding to the large amplitude vibrations. Therefore, the condition for vibration protection efficiency is performed only within .
Unfortunately, not always there is a choice of effective frequency mode of a vibration isolator due to technical or technological reasons. In this case, the possibility of excluding dangerous vibrations must be anticipated in the design of vibration isolation systems. There are two possibilities for this. The first way is to increase the steepness of the backbone curve, so that within the operating frequency backbone curve would lie above the limit one (after point A). Typically, this measure leads to an increase in the size of vibration isolation systems.
The second way is to increase the damping coefficient that leads to a decrease of the limiting line’s angle to a horizontal axis. So, the limit curve would lie below the backbone one. If we draw a tangent to the backbone curve from the central point and assign the coordinates of tangent point as and , then the resonance vibration damping condition with large amplitudes is brought to the following form:
In many cases, the rigidity of borders is unknown or very large. Then the interesting task is to determine a range all the way to d, so that any elastic border characteristic would not cause shocks. The resonant modes in isolator efficiency area (at ) cannot occur if:
2.3 Calculation and design of vibration isolators of viscous friction
Now we consider the calculation of nonlinear vibration isolators with the most used types of elastic characteristics. For an isolator with an odd cubic characteristic, we can write:
\( R_y = c x + e x^3 \)
From (4) we obtain the following backbone curve equation \( \lambda^2 = \lambda_0^2 \left(1 + \frac{3 a^2 e}{4 c}\right) \)
For symbol \( \beta = \frac{a}{a_c} \), we write
\( a_c = \frac{F_0}{c} \) at f0 = const and \( a_c = \xi_0 \) at \( f_0 = \xi_0 \omega^2 \).
Then, from (6) we have:
where \( \mu = 1 \) at f0 = const; \( \mu = z^2 \) at \( f_0 = \xi_0 \omega^2 \).
Now the backbone curve equation can be transformed into:
\( \nu^2 = 1 + 0.75 \frac{e}{c} a_c^2 \beta^2 = 1 + 0.75 \gamma \beta^2 \).
By substituting this expression into (11), we obtain the following cubic equation:
\( 0.5625 \gamma^2 x^3 + 1.5 \gamma (1 - z^2) x^2 + [(1 - z^2)^2 + 4 n^2 z^2] x - \mu^2 = 0 \),
where \( x = \beta^2 \).
By solving the equation for the constant $\gamma$, $n$, $z$, we can find $\beta^2$, and then determine $\nu^2(a)$. According to (7), we then determine the vibration isolation efficiency coefficient.
Using a PC application, MATLAB, we calculated the isolator of this type and for different values of n and γ. The calculation results with n = 0.1 and γ = 0.1 are shown in Fig. 2 for f0 = const. The figure shows that after reaching the maximum the vibration amplitude comes the vibration stop and the vibration isolation coefficient sharply decreases. Vibration protection effectiveness is provided at z >= 1.46.
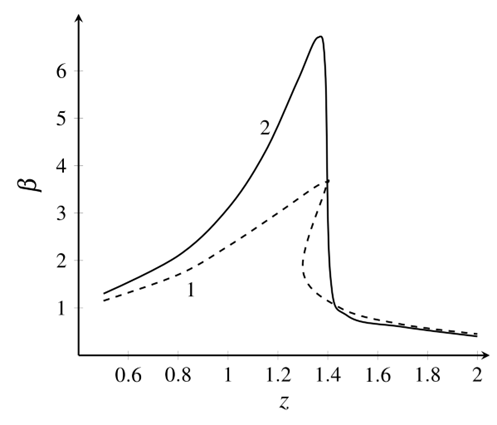
Fig. 2. The AFC (curve 1) and the vibration isolation behavior graph (curve 2)
In calculating the project, based on (8) and the dampening smallness condition, (11) is brought to the following form:
where d = 1 at f0 = const and \( d = 2\nu^2 \) at \( f_0 = \xi_0 \omega^2 \).
In this case, the equation becomes:
\( 0.75 \gamma \beta^3 + \beta - d = 0 \).
Here we determine the equation root and check the effectiveness of vibration protection conditions for the working frequency range
\( \omega_{\min}^2 \geq 2 (1 + 0.75 \gamma \beta_*^2)\frac{c}{m} \)
If this condition is not satisfied, researchers check an isolator of a different brand. In order to reduce the size of vibration isolation systems it is recommended to start the selection with a vibration isolator with stiffer elastic characteristics.
For a pre-loaded isolator with
\( R_y = c x + H_0 \, \text{sign}(x) \)
the backbone curve equation is brought to the form of $\lambda^2 = \lambda_0^2 \left(1 + \frac{4H}{\pi c a}\right)$ or the following dimensionless form (kinematic excitation here $F_0 = c \xi_0$ ):
Based on this, the resonance curve equation (11) transforms into the following equality:
\( \beta^2 [(1 - z^2)^2 + 4 n^2 z^2] + 2 \gamma (1 - z^2)\beta + \gamma^2 - \mu^2 = 0 \).
Here we can determine β at this frequency, with the previous expression we can find $\nu^2(\beta)$, and expression (7) can provide the vibration protection efficiency coefficient.
In designing these vibration isolators, one should remember that the vibration isolator does not work if $F_0 \leq H_0$, it is ‘locked’, while normal operation is provided if $F_0 \geq \frac{4H_0}{\pi}$ [6]. It follows that the design calculations should be:
The equation for calculating project (12) under force action with based on (13) is brought to the form of:
$\beta_* = 1 - \gamma$
Then, vibration protection efficiency (8) transforms into:
Vibration isolator is characterized by two elastic parameters $H_0$ and c. To pick them, we obtained expressions (14) and (15), connecting these parameters to the load characteristics $F_0$ and .$\omega$
Under kinematic action in the calculation of projects (12) based on (13) we obtain:
\( \beta^2 - 2\left(1 - \frac{\gamma}{2}\right)\beta - 2\gamma = 0 \)
By solving the equation, we determine $\beta_* = 2$ , so the vibration protection efficiency condition (15) transforms into:
\( \omega_{\min} \geq \sqrt{2\left(1 + \frac{\gamma}{2}\right)\frac{c}{m}} \).
Now we consider the calculation of a vibration isolator with symmetric elastic linear limiters, installed at a distance d from the equilibrium position. The elastic force in this case is described as follows:
\( R_y = c x \quad \text{za } |x| \leq d \)
\( R_y = c x + c(\gamma - 1)[x - d \sin x] \quad \text{za } |x| > d \)
where $\gamma = \frac{c_1}{c}$; c1 is the border rigidity.
Then from (4) we have:
\( \lambda^2 = \frac{\lambda_0^2}{\pi a} \left[ a \int_{0}^{2\pi} \cos^2 \psi \, d\psi + 4(\gamma - 1)\int_{\psi_1}^{\pi/2} (a \cos^2 \psi - d \cos \psi)\, d\psi \right] \),
where $\psi_1 = \arccos\left(\frac{d}{a}\right)$.
After integrating we obtain:
\( \lambda^2 = \lambda_0^2 \left[ 1 + (\gamma - 1)\left(1 - \frac{2d}{\pi a^2}\sqrt{a^2 - d^2} - \frac{2}{\pi}\arcsin\left(\frac{d}{a}\right) \right) \right], \quad (a > d) \).
The backbone curve in dimensionless form is:
\( \nu^2(a) = 1 + (\gamma - 1)\left[1 - \frac{2}{\pi}\left(\frac{\sqrt{\eta^2 - 1}}{\eta^2} + \arcsin\left(\frac{1}{\eta}\right)\right) \right] \).
We determine the value of the dampening coefficient, which will remove resonance vibrations with a large amplitude at kinematic excitation. To do this, with the known γ we build a backbone curve and draw a tangent line to it from the central point. Here we define the coordinates of the tangent point and according to the formula (9) we determine the desired value of dampening coefficient. The calculation for γ = 16 is shown in Fig. 3. Here we determine:
\( n \geq n_* = \frac{0.69 \xi_0}{d} \)
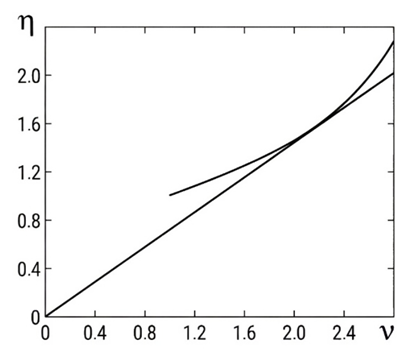
Fig. 3. The determination of the critical vibration isolator damping coefficient with symmetrical stops
After carrying out similar calculations for a variety of γ, we can get a functional connection graph of the coefficient α to the parameter γ. Such graph is shown in Fig. 4. With such damping coefficient the determination of vibration isolation coefficient can be found with linear theory by using the following formula:
\( k_R = \sqrt{\frac{1 + 4 n^2 z^2}{(1 - z^2)^2 + 4 n^2 z^2}} \).
Project calculations can also be determined with the following linear theory:
\( c \leq m \omega_{\min} \sqrt{2} \)
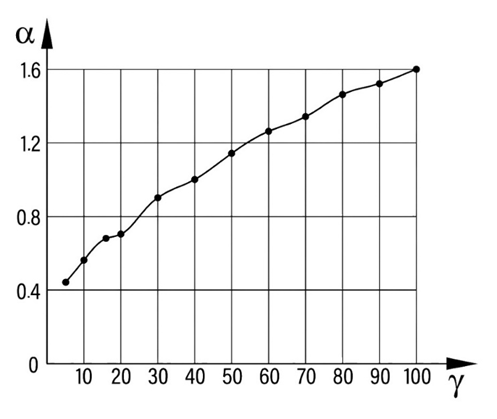
Fig. 4. The graph of functional connection of critical dampening coefficient to rigidity ratio
If borders are rigid, then the distance to the stop or the damping coefficient should be selected according to formula (9) $d > d_* = \xi_0 \, \omega_{\max}$. Further calculations are carried out with the linear theory.
3 Results and discussion
We have selected a dynamic and nonlinear mathematical model of vibration isolation systems with one degree of freedom under the harmonic, force, and kinematic action. By linearization of nonlinear elastic and dissipative characteristics of a vibration isolator around the average motion, we have obtained an equation of a vibration-isolated object motion. The solution of the equation was determined by the method of harmonic balance. It allowed us to determine the equation of the backbone curve, the amplitude of the forced vibrations, and the vibration protection efficiency coefficient.
The authors conducted an analysis of amplitude-frequency characteristics of vibration isolators and identified frequency ranges, in which resonance phenomena are possible. The example of vibration isolators with viscous friction showed the vibration protection efficiency conditions in the frequency range under the force and kinematic action. For a given frequency mode scientists specified the conditions for ensuring the vibration isolation efficiency by adjusting the vibration isolator parameters.
Next, the authors considered vibration isolators with different nonlinear elastic characteristics: a cubic characteristic, preload, symmetric elastic linear (or absolutely rigid) borders. They obtained explicit equations of backbone curves, equation to determine the vibration amplitude. The joint solution of these equations makes it possible to determine the frequency and amplitude of nonlinear vibrations under specific operating conditions and specific elastic and dissipative parameters of vibration isolator. Through these kinematic characteristics researchers determined the efficiency coefficient of vibration protection. In project calculations of vibration isolation efficiency can be determined any varied characteristic of the vibration isolator (rigidity, distance to borders, damping coefficient, etc.). If the expression to select the characteristics of a vibration isolator cannot be obtained in an explicit form, then a project calculation method must be specified. Such calculations are for the vibration isolators with viscous and dry friction. These results were obtained for the first time and demonstrate the scientific novelty of research.
The study is complete, containing new scientific results, representing the development of methods of calculation and design of one-dimensional nonlinear vibration protection systems under harmonic actions. In contrast to the studies of the other authors [16, 17, 18, 26, 27], they are sufficiently general, as applicable to the calculation of all types of one-dimensional systems of vibration protection equipment. However, based on general relations, the paper developed methods or obtained specific expressions for calculation and design of vibration isolators with frequent nonlinear elastic-dissipative properties.
The results are in good agreement with the theory of nonlinear vibrations of mechanical systems, which indirectly indicates their authenticity. The reliability of the results was checked by carrying out numerical calculations and comparing them for particular cases to the results of a well-developed theory of linear vibration protection and a well-known solution of the nonlinear Duffing equation [30].
The scientific novelty of the research lies in the following:
Derivation of generalized analytical dependencies for the amplitude-frequency characteristics of vibration isolators with arbitrary nonlinear elastic and dissipative properties.
Establishment of the specific influence of different friction types (viscous, dry, internal) on the 'locking' phenomena and high-frequency isolation efficiency.
Development of an analytical criterion (limit curve equation) for predicting amplitude jumps and instability zones in nonlinear isolation systems.
4 Conclusions
In this paper, using the harmonic linearization method, the authors determined the basic functional connections for calculation of vibration isolators with non-linear elastic characteristics under harmonic, force and kinematic action. These functional connections allowed us to determine the frequency of nonlinear free vibrations, the amplitude of the forced vibrations and the vibration isolation efficiency coefficient. Based on these functional connections, we have analyzed forms of the backbone curves and amplitude-frequency characteristics of nonlinear systems and obtained the parameters for efficient vibration isolator frequency selection mode. We have determined the conditions for selecting vibration isolator parameters, excluding the appearance of vibrations with a large amplitude in the system. Methods of calculation and design of such nonlinear vibration isolators were also introduced.
For the most common types of vibration isolators with nonlinear elastic characteristics, it was developed specific equations and formulas to assess the efficiency of vibration isolation and select the parameters of a vibration isolator based on the efficiency of vibration protection.
The scientific value of the results lies in the output of the basic functional connections for the calculation of the efficiency and design of vibration isolators with different nonlinear characteristics under harmonic action, the development of methods of calculation and design of nonlinear vibration isolators by the criterion of efficiency of vibration protection.
Practical application of the results, obtained in the work, lies in the fact that they allow to evaluate the effectiveness of particular vibration isolators under the given operating conditions. These results can be used for selecting elastic-dissipative parameters of vibration isolators of various types, as well as the destination of resonanceless operating modes of an object with a certain vibration isolator.
The potential of this research is to study the vibrations of nonlinear vibration isolators under polyharmonic, pulse, shock, and random actions. Also, great scientific and practical significance has the study of similar closed vibration isolation systems.
Acknowledgements
No external funding was received.
References
- Frolov, K. V. (1982). The dynamic properties of linear vibration isolation systems. Nauka.
- Rivin, E. I. (2003). Passive vibration isolation. ASME Press.
- Glagovsky, B. A., Kazachok, A. G., & Pellinets, V. S. (1971). Tables and graphs to calculate the behaviour of linear systems at impulse action. Nauka.
- Piersol, A. G., & Paez, T. L. (Eds.). (2009). Harris’ shock and vibration handbook (6th ed.). McGraw-Hill.
- Larin, V. B. (1974). Statistical problems of vibration protection. Naukova Dumka.
- Kolovskiy, M. Z. (1966). Nonlinear theory of vibration isolation systems. Nauka.
- Wolpert, E. G. (1972). Dynamics of dampers with nonlinear elastic elements. Engineering.
- Wu, Y., Yu, K., Jiao, J., & Zhao, R. (2015). Dynamic modeling and robust nonlinear control of a six-DOF active micro-vibration isolation manipulator with parameter uncertainties. Mechanism and Machine Theory, 92, 407–435. https://doi.org/10.1016/j.mechmachtheory.2015.06.008
- Coppola, G., Liu, K., Liu, X., & Zhang, D. (2015). Experimental study on the control of a novel vibration isolator via adaptive backstepping. Journal of Vibration and Control, 21(7), 1321–1339. https://doi.org/10.1177/1077546313497243
- Lin, T.-K., Lu, L.-Y., & Chen, C.-J. (2018). Semi-active leverage-type isolation system considering minimum structural energy. Smart Structures and Systems, 21(3), 373–387. https://doi.org/10.12989/sss.2018.21.3.373
- Ali, A. M., Alexander, J., & Ray, T. (2024). A multilevel iterative algorithm for robust nonlinear dynamic analysis of force-based beam structure. International Journal of Structural Engineering, 14(1), 25–41. https://doi.org/10.1504/IJSTRUCTE.2024.136894
- Lu, Z., Yang, T., Brennan, M. J., et al. (2014). On the performance of a two-stage vibration isolation system which has geometrically nonlinear stiffness. Journal of Vibration and Acoustics, 136(6), 061009. https://doi.org/10.1115/1.4028379
- Sun, X., Jing, X., Xu, J., & Cheng, L. (2014). Vibration isolation via a scissor-like structured platform. Journal of Sound and Vibration, 333(9), 2404–2420. https://doi.org/10.1016/j.jsv.2013.12.025
- Lu, Z.-Q., Chen, L.-Q., Brennan, M. J., Li, J.-M., & Ding, H. (2016). The characteristics of vibration isolation system with geometrically nonlinear damping and stiffness. Journal of Physics: Conference Series, 744, 012115. https://doi.org/10.1088/1742-6596/744/1/012115
- Huang, X., Sun, J., Hua, H., & Zhang, Z. (2016). The isolation performance of vibration systems with general velocity-displacement-dependent nonlinear damping under base excitation. Nonlinear Dynamics, 85(2), 777–796. https://doi.org/10.1007/s11071-016-2722-4
- Abolfathi, A., Brennan, M. J., Waters, T. P., & Tang, B. (2015). On the effects of mistuning a force-excited system containing a quasi-zero-stiffness vibration isolator. Journal of Vibration and Acoustics, 137(4), 044502. https://doi.org/10.1115/1.4029689
- Zhou, J., Wang, X., Xu, D., & Bishop, S. (2015). Nonlinear dynamic characteristics of a quasi-zero stiffness vibration isolator. Journal of Sound and Vibration, 346, 53–69. https://doi.org/10.1016/j.jsv.2015.02.005
- Le, T. D., & Ahn, K. K. (2013). Experimental investigation of a vibration isolation system using negative stiffness structure. International Journal of Mechanical Sciences, 70, 99–112. https://doi.org/10.1016/j.ijmecsci.2013.02.009
- Yang, J., Xiong, Y. P., & Xing, J. T. (2013). Dynamics and power flow behaviour of a nonlinear vibration isolation system with a negative stiffness mechanism. Journal of Sound and Vibration, 332(1), 167–183. https://doi.org/10.1016/j.jsv.2012.08.010
- Li, H., Li, Y., & Li, J. (2020). Negative stiffness devices for vibration isolation applications: A review. Advances in Structural Engineering, 23(8), 1739–1755. https://doi.org/10.1177/1369433219900311
- Bakirov, Z. B., Portnov, V. S., Tazhenova, G. D., & Malybaev, N. S. (2012). Calculation of nonlinear vibration isolators at shock. Ugol, (5), 77–79.
- Ledezma-Ramirez, D. F., Ferguson, N. S., Brennan, M. J., & Tang, B. (2015). An experimental nonlinear low dynamic stiffness device for shock isolation. Journal of Sound and Vibration, 347, 1–13. https://doi.org/10.1016/j.jsv.2015.02.006
- Tang, B., & Brennan, M. J. (2014). On the shock performance of a nonlinear vibration isolator. International Journal of Mechanical Sciences, 81, 207–214. https://doi.org/10.1016/j.ijmecsci.2014.02.019
- Lee, J., Kim, C.-J., Lee, C., & Oh, C. (2020). Optimal design of multiple tuned mass dampers. Journal of Manufacturing Science and Engineering, 142(5), 051006. https://doi.org/10.1115/1.4045628
- Li, D., Liu, F., Deng, J., et al. (2022). Nonlinear damping curve control of semi-active suspension. IEEE Access, 10, 93630–93641. https://doi.org/10.1109/ACCESS.2022.3201867
- Mofidian, S. M. M., & Bardaweel, H. (2018a). Displacement transmissibility evaluation of vibration isolation system. Journal of Vibration and Control, 24(18), 4247–4259. https://doi.org/10.1177/1077546317722702
- Zuo, Z., Wang, J., Wang, H., & Wang, Q. (2021). Passive vibration isolation of flexure jointed hexapod. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 235(14), 2496–2506. https://doi.org/10.1177/0954406220954483
- Legeza, V. P. (2018). Dynamics of vibration isolation system with a ball vibration absorber. International Applied Mechanics, 54(5), 584–593. https://doi.org/10.1007/s10778-018-0912-0
- Mofidian, S. M. M., & Bardaweel, H. (2018b). Elastic-magnetic vibration isolation system. Journal of Intelligent Material Systems and Structures, 29(18), 3550–3561. https://doi.org/10.1177/1045389X18783869
- Younesian, D., Esmailzadeh, E., & Askari, H. (2018). Vibration analysis of oscillators with generalized inertial and geometrical nonlinearities. In L. Dai & R. N. Jazar (Eds.), Nonlinear approaches in engineering applications (pp. 147–166). Springer.
Conflict of Interest Statement
The authors declare no conflict of interest.
Author Contributions
Data Availability Statement
The data supporting the findings of this study are available from the corresponding author upon reasonable request.
Supplementary Materials
There are no supplementary materials to include.